 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Diffusion-based Augmentation for Recommendation
Jan 04, 2026Recommendation systems often rely on implicit feedback, where only positive user-item interactions can be observed. Negative sampling is therefore crucial to provide proper negative training signals. However, existing methods tend to mislabel potentially positive but unobserved items as negatives and lack precise control over negative sample selection. We aim to address these by generating controllable negative samples, rather than sampling from the existing item pool. In this context, we propose Adaptive Diffusion-based Augmentation for Recommendation (ADAR), a novel and model-agnostic module that leverages diffusion to synthesize informative negatives. Inspired by the progressive corruption process in diffusion, ADAR simulates a continuous transition from positive to negative, allowing for fine-grained control over sample hardness. To mine suitable negative samples, we theoretically identify the transition point at which a positive sample turns negative and derive a score-aware function to adaptively determine the optimal sampling timestep. By identifying this transition point, ADAR generates challenging negative samples that effectively refine the model's decision boundary. Experiments confirm that ADAR is broadly compatible and boosts the performance of existing recommendation models substantially, including collaborative filtering and sequential recommendation, without architectural modifications.
Eq.Bot: Enhance Robotic Manipulation Learning via Group Equivariant Canonicalization
Nov 19, 2025Robotic manipulation systems are increasingly deployed across diverse domains. Yet existing multi-modal learning frameworks lack inherent guarantees of geometric consistency, struggling to handle spatial transformations such as rotations and translations. While recent works attempt to introduce equivariance through bespoke architectural modifications, these methods suffer from high implementation complexity, computational cost, and poor portability. Inspired by human cognitive processes in spatial reasoning, we propose Eq.Bot, a universal canonicalization framework grounded in SE(2) group equivariant theory for robotic manipulation learning. Our framework transforms observations into a canonical space, applies an existing policy, and maps the resulting actions back to the original space. As a model-agnostic solution, Eq.Bot aims to endow models with spatial equivariance without requiring architectural modifications. Extensive experiments demonstrate the superiority of Eq.Bot under both CNN-based (e.g., CLIPort) and Transformer-based (e.g., OpenVLA-OFT) architectures over existing methods on various robotic manipulation tasks, where the most significant improvement can reach 50.0%.
AC-EVAL: Evaluating Ancient Chinese Language Understanding in Large Language Models
Mar 11, 2024

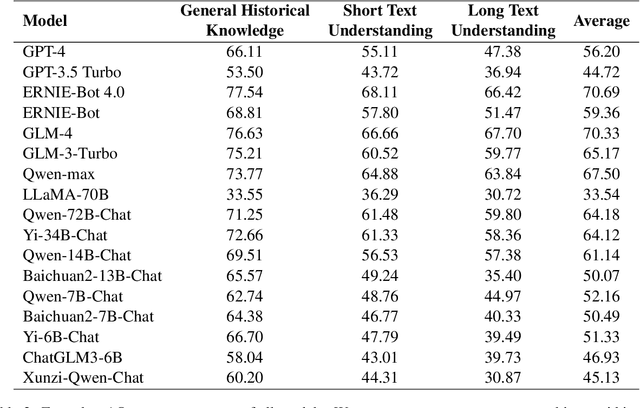
Given the importance of ancient Chinese in capturing the essence of rich historical and cultural heritage, the rapid advancements in Large Language Models (LLMs) necessitate benchmarks that can effectively evaluate their understanding of ancient contexts. To meet this need, we present AC-EVAL, an innovative benchmark designed to assess the advanced knowledge and reasoning capabilities of LLMs within the context of ancient Chinese. AC-EVAL is structured across three levels of difficulty reflecting different facets of language comprehension: general historical knowledge, short text understanding, and long text comprehension. The benchmark comprises 13 tasks, spanning historical facts, geography, social customs, art, philosophy, classical poetry and prose, providing a comprehensive assessment framework. Our extensive evaluation of top-performing LLMs, tailored for both English and Chinese, reveals a substantial potential for enhancing ancient text comprehension. By highlighting the strengths and weaknesses of LLMs, AC-EVAL aims to promote their development and application forward in the realms of ancient Chinese language education and scholarly research. The AC-EVAL data and evaluation code are available at https://github.com/yuting-wei/AC-EVAL.