 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEq.Bot: Enhance Robotic Manipulation Learning via Group Equivariant Canonicalization
Nov 19, 2025Robotic manipulation systems are increasingly deployed across diverse domains. Yet existing multi-modal learning frameworks lack inherent guarantees of geometric consistency, struggling to handle spatial transformations such as rotations and translations. While recent works attempt to introduce equivariance through bespoke architectural modifications, these methods suffer from high implementation complexity, computational cost, and poor portability. Inspired by human cognitive processes in spatial reasoning, we propose Eq.Bot, a universal canonicalization framework grounded in SE(2) group equivariant theory for robotic manipulation learning. Our framework transforms observations into a canonical space, applies an existing policy, and maps the resulting actions back to the original space. As a model-agnostic solution, Eq.Bot aims to endow models with spatial equivariance without requiring architectural modifications. Extensive experiments demonstrate the superiority of Eq.Bot under both CNN-based (e.g., CLIPort) and Transformer-based (e.g., OpenVLA-OFT) architectures over existing methods on various robotic manipulation tasks, where the most significant improvement can reach 50.0%.
One-Shot Mutual Affine-Transfer for Photorealistic Stylization
Jul 24, 2019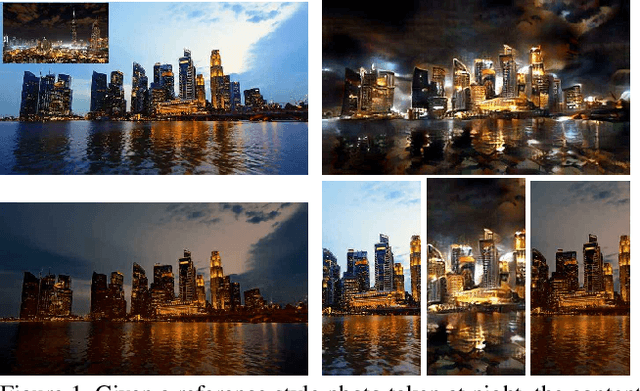
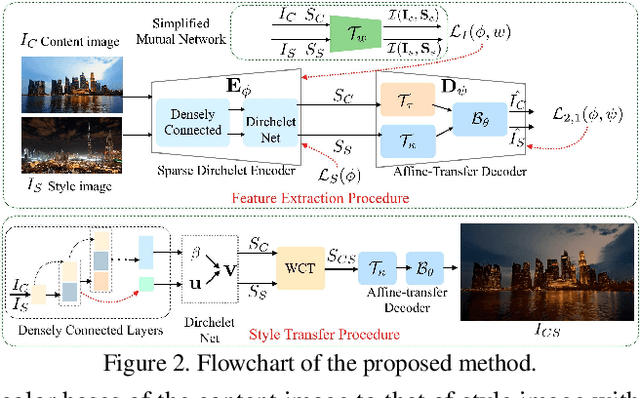
Photorealistic style transfer aims to transfer the style of a reference photo onto a content photo naturally, such that the stylized image looks like a real photo taken by a camera. Existing state-of-the-art methods are prone to spatial structure distortion of the content image and global color inconsistency across different semantic objects, making the results less photorealistic. In this paper, we propose a one-shot mutual Dirichlet network, to address these challenging issues. The essential contribution of the work is the realization of a representation scheme that successfully decouples the spatial structure and color information of images, such that the spatial structure can be well preserved during stylization. This representation is discriminative and context-sensitive with respect to semantic objects. It is extracted with a shared sparse Dirichlet encoder. Moreover, such representation is encouraged to be matched between the content and style images for faithful color transfer. The affine-transfer model is embedded in the decoder of the network to facilitate the color transfer. The strong representative and discriminative power of the proposed network enables one-shot learning given only one content-style image pair. Experimental results demonstrate that the proposed method is able to generate photorealistic photos without spatial distortion or abrupt color changes.
Unsupervised Trajectory Segmentation and Promoting of Multi-Modal Surgical Demonstrations
Oct 01, 2018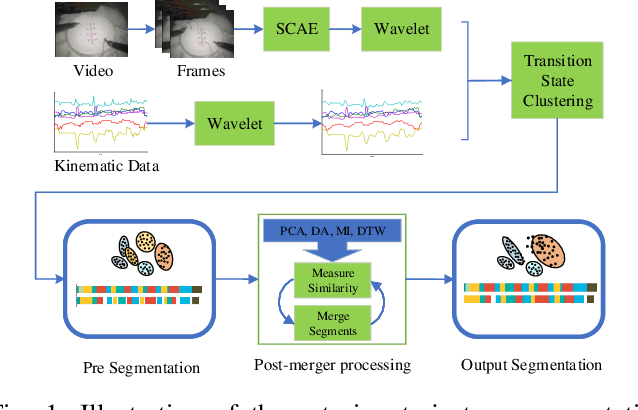
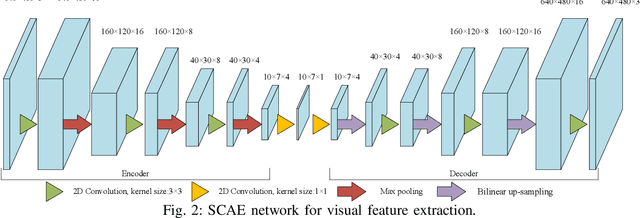
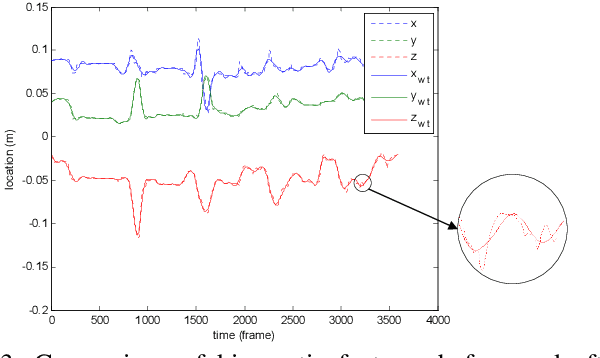
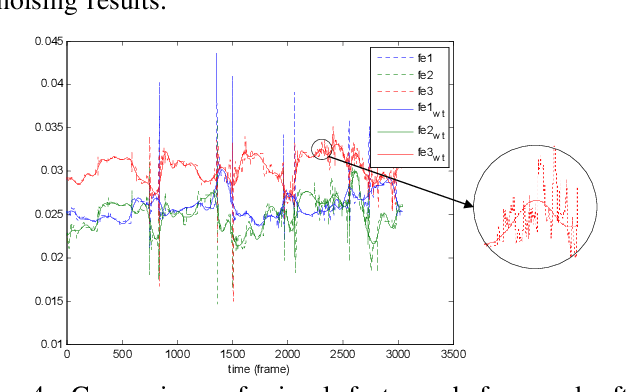
To improve the efficiency of surgical trajectory segmentation for robot learning in robot-assisted minimally invasive surgery, this paper presents a fast unsupervised method using video and kinematic data, followed by a promoting procedure to address the over-segmentation issue. Unsupervised deep learning network, stacking convolutional auto-encoder, is employed to extract more discriminative features from videos in an effective way. To further improve the accuracy of segmentation, on one hand, wavelet transform is used to filter out the noises existed in the features from video and kinematic data. On the other hand, the segmentation result is promoted by identifying the adjacent segments with no state transition based on the predefined similarity measurements. Extensive experiments on a public dataset JIGSAWS show that our method achieves much higher accuracy of segmentation than state-of-the-art methods in the shorter time.