 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSceneCrafter: Controllable Multi-View Driving Scene Editing
Jun 24, 2025Simulation is crucial for developing and evaluating autonomous vehicle (AV) systems. Recent literature builds on a new generation of generative models to synthesize highly realistic images for full-stack simulation. However, purely synthetically generated scenes are not grounded in reality and have difficulty in inspiring confidence in the relevance of its outcomes. Editing models, on the other hand, leverage source scenes from real driving logs, and enable the simulation of different traffic layouts, behaviors, and operating conditions such as weather and time of day. While image editing is an established topic in computer vision, it presents fresh sets of challenges in driving simulation: (1) the need for cross-camera 3D consistency, (2) learning ``empty street" priors from driving data with foreground occlusions, and (3) obtaining paired image tuples of varied editing conditions while preserving consistent layout and geometry. To address these challenges, we propose SceneCrafter, a versatile editor for realistic 3D-consistent manipulation of driving scenes captured from multiple cameras. We build on recent advancements in multi-view diffusion models, using a fully controllable framework that scales seamlessly to multi-modality conditions like weather, time of day, agent boxes and high-definition maps. To generate paired data for supervising the editing model, we propose a novel framework on top of Prompt-to-Prompt to generate geometrically consistent synthetic paired data with global edits. We also introduce an alpha-blending framework to synthesize data with local edits, leveraging a model trained on empty street priors through novel masked training and multi-view repaint paradigm. SceneCrafter demonstrates powerful editing capabilities and achieves state-of-the-art realism, controllability, 3D consistency, and scene editing quality compared to existing baselines.
UniGen: Unified Modeling of Initial Agent States and Trajectories for Generating Autonomous Driving Scenarios
May 06, 2024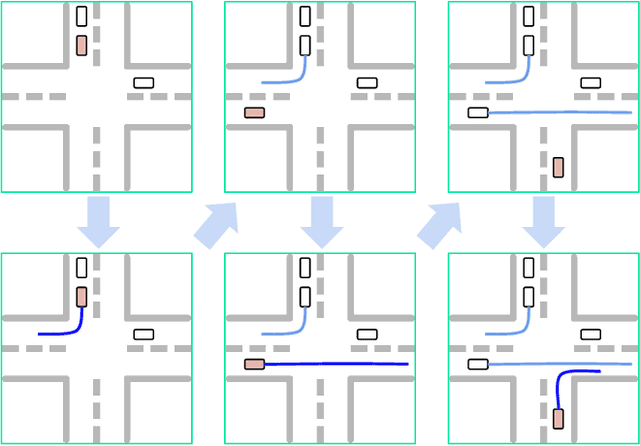
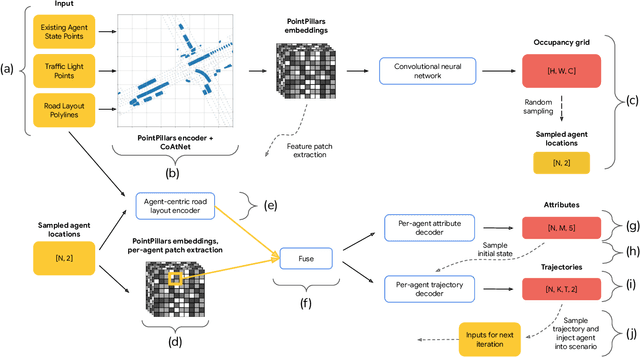
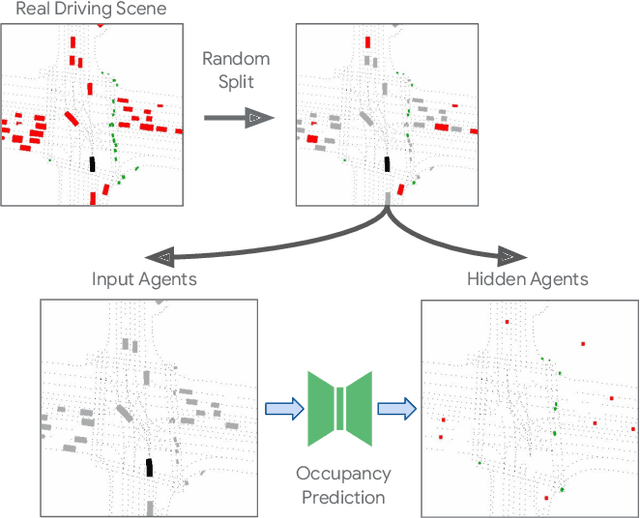
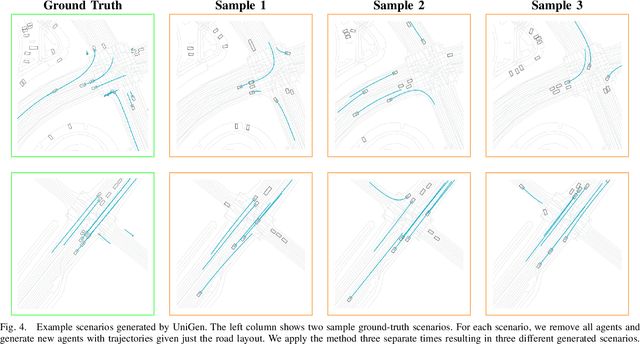
This paper introduces UniGen, a novel approach to generating new traffic scenarios for evaluating and improving autonomous driving software through simulation. Our approach models all driving scenario elements in a unified model: the position of new agents, their initial state, and their future motion trajectories. By predicting the distributions of all these variables from a shared global scenario embedding, we ensure that the final generated scenario is fully conditioned on all available context in the existing scene. Our unified modeling approach, combined with autoregressive agent injection, conditions the placement and motion trajectory of every new agent on all existing agents and their trajectories, leading to realistic scenarios with low collision rates. Our experimental results show that UniGen outperforms prior state of the art on the Waymo Open Motion Dataset.