 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniGen: Unified Modeling of Initial Agent States and Trajectories for Generating Autonomous Driving Scenarios
May 06, 2024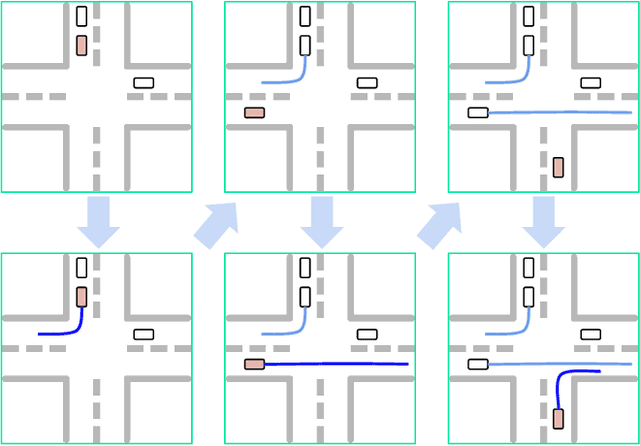
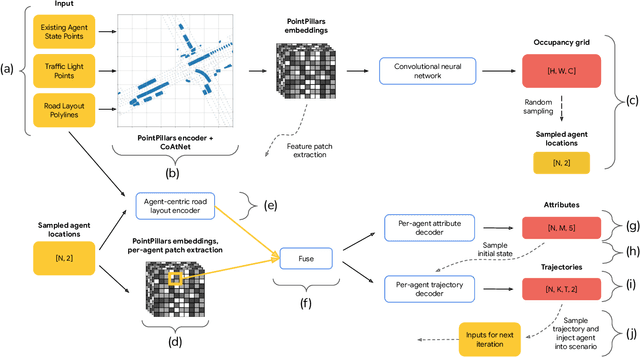
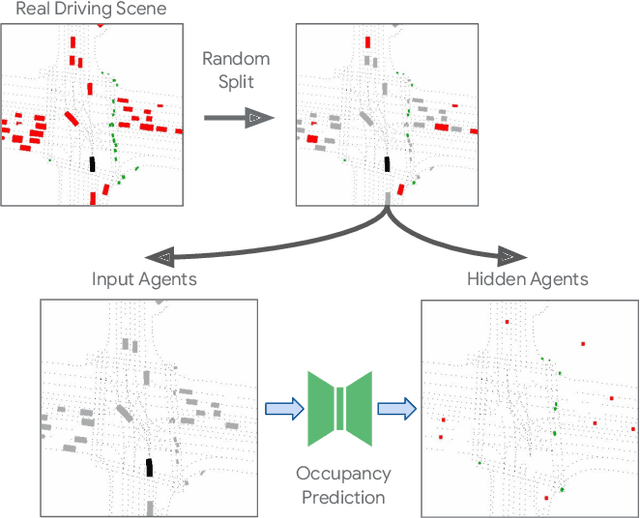
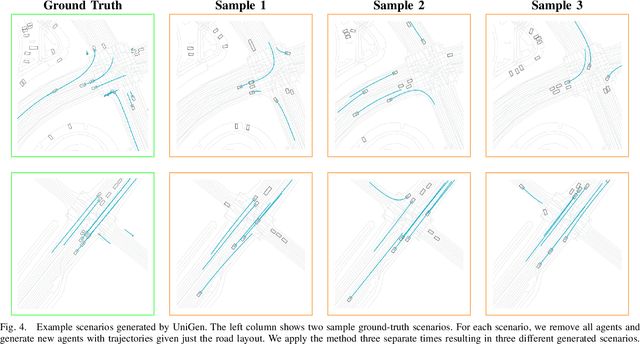
This paper introduces UniGen, a novel approach to generating new traffic scenarios for evaluating and improving autonomous driving software through simulation. Our approach models all driving scenario elements in a unified model: the position of new agents, their initial state, and their future motion trajectories. By predicting the distributions of all these variables from a shared global scenario embedding, we ensure that the final generated scenario is fully conditioned on all available context in the existing scene. Our unified modeling approach, combined with autoregressive agent injection, conditions the placement and motion trajectory of every new agent on all existing agents and their trajectories, leading to realistic scenarios with low collision rates. Our experimental results show that UniGen outperforms prior state of the art on the Waymo Open Motion Dataset.
Particle-Based Score Estimation for State Space Model Learning in Autonomous Driving
Dec 14, 2022Multi-object state estimation is a fundamental problem for robotic applications where a robot must interact with other moving objects. Typically, other objects' relevant state features are not directly observable, and must instead be inferred from observations. Particle filtering can perform such inference given approximate transition and observation models. However, these models are often unknown a priori, yielding a difficult parameter estimation problem since observations jointly carry transition and observation noise. In this work, we consider learning maximum-likelihood parameters using particle methods. Recent methods addressing this problem typically differentiate through time in a particle filter, which requires workarounds to the non-differentiable resampling step, that yield biased or high variance gradient estimates. By contrast, we exploit Fisher's identity to obtain a particle-based approximation of the score function (the gradient of the log likelihood) that yields a low variance estimate while only requiring stepwise differentiation through the transition and observation models. We apply our method to real data collected from autonomous vehicles (AVs) and show that it learns better models than existing techniques and is more stable in training, yielding an effective smoother for tracking the trajectories of vehicles around an AV.