 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParticle-Based Score Estimation for State Space Model Learning in Autonomous Driving
Dec 14, 2022Multi-object state estimation is a fundamental problem for robotic applications where a robot must interact with other moving objects. Typically, other objects' relevant state features are not directly observable, and must instead be inferred from observations. Particle filtering can perform such inference given approximate transition and observation models. However, these models are often unknown a priori, yielding a difficult parameter estimation problem since observations jointly carry transition and observation noise. In this work, we consider learning maximum-likelihood parameters using particle methods. Recent methods addressing this problem typically differentiate through time in a particle filter, which requires workarounds to the non-differentiable resampling step, that yield biased or high variance gradient estimates. By contrast, we exploit Fisher's identity to obtain a particle-based approximation of the score function (the gradient of the log likelihood) that yields a low variance estimate while only requiring stepwise differentiation through the transition and observation models. We apply our method to real data collected from autonomous vehicles (AVs) and show that it learns better models than existing techniques and is more stable in training, yielding an effective smoother for tracking the trajectories of vehicles around an AV.
Leveraging Natural Language Processing to Augment Structured Social Determinants of Health Data in the Electronic Health Record
Dec 14, 2022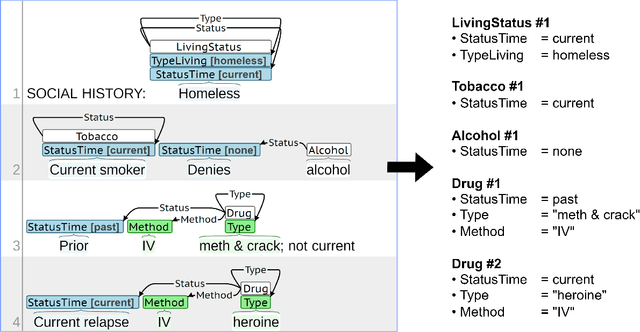


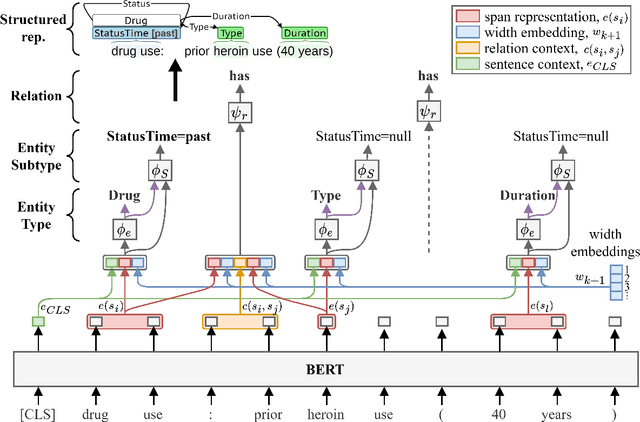
Objective: Social Determinants of Health (SDOH) influence personal health outcomes and health systems interactions. Health systems capture SDOH information through structured data and unstructured clinical notes; however, clinical notes often contain a more comprehensive representation of several key SDOH. The objective of this work is to assess the SDOH information gain achievable by extracting structured semantic representations of SDOH from the clinical narrative and combining these extracted representations with available structured data. Materials and Methods: We developed a natural language processing (NLP) information extraction model for SDOH that utilizes a deep learning entity and relation extraction architecture. In an electronic health record (EHR) case study, we applied the SDOH extractor to a large existing clinical data set with over 200,000 patients and 400,000 notes and compared the extracted information with available structured data. Results: The SDOH extractor achieved 0.86 F1 on a withheld test set. In the EHR case study, we found 19\% of current tobacco users, 10\% of drug users, and 32\% of homeless patients only include documentation of these risk factors in the clinical narrative. Conclusions: Patients who are at-risk for negative health outcomes due to SDOH may be better served if health systems are able to identify SDOH risk factors and associated social needs. Structured semantic representations of text-encoded SDOH information can augment existing structured, and this more comprehensive SDOH representation can assist health systems in identifying and addressing social needs.