 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGNN-Transformer Cooperative Architecture for Trustworthy Graph Contrastive Learning
Dec 24, 2024



Graph contrastive learning (GCL) has become a hot topic in the field of graph representation learning. In contrast to traditional supervised learning relying on a large number of labels, GCL exploits augmentation strategies to generate multiple views and positive/negative pairs, both of which greatly influence the performance. Unfortunately, commonly used random augmentations may disturb the underlying semantics of graphs. Moreover, traditional GNNs, a type of widely employed encoders in GCL, are inevitably confronted with over-smoothing and over-squashing problems. To address these issues, we propose GNN-Transformer Cooperative Architecture for Trustworthy Graph Contrastive Learning (GTCA), which inherits the advantages of both GNN and Transformer, incorporating graph topology to obtain comprehensive graph representations. Theoretical analysis verifies the trustworthiness of the proposed method. Extensive experiments on benchmark datasets demonstrate state-of-the-art empirical performance.
Learning to Localize Through Compressed Binary Maps
Dec 20, 2020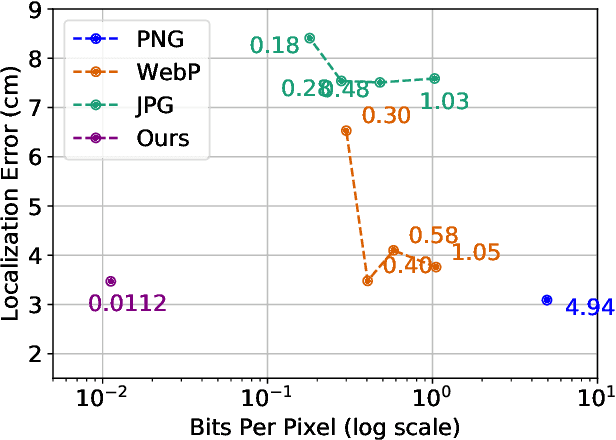
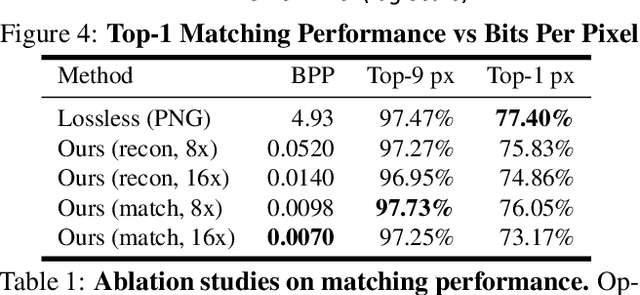
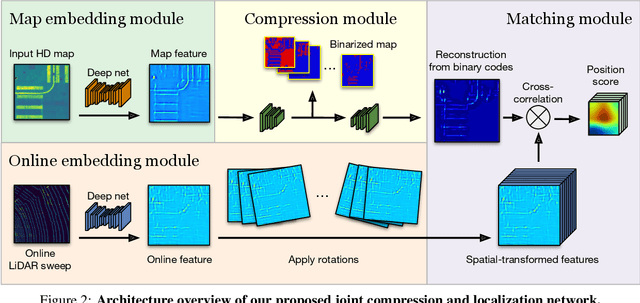
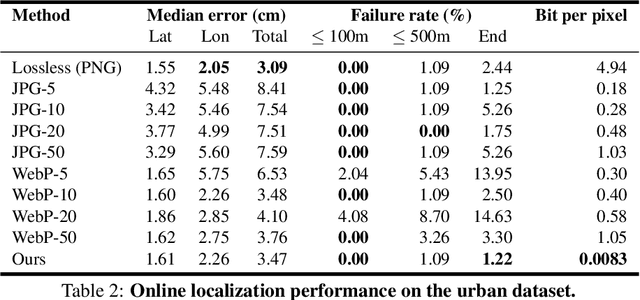
One of the main difficulties of scaling current localization systems to large environments is the on-board storage required for the maps. In this paper we propose to learn to compress the map representation such that it is optimal for the localization task. As a consequence, higher compression rates can be achieved without loss of localization accuracy when compared to standard coding schemes that optimize for reconstruction, thus ignoring the end task. Our experiments show that it is possible to learn a task-specific compression which reduces storage requirements by two orders of magnitude over general-purpose codecs such as WebP without sacrificing performance.
* 18 pages, 12 figures, 6 tables; Presented at CVPR 2019
Neural Turtle Graphics for Modeling City Road Layouts
Oct 04, 2019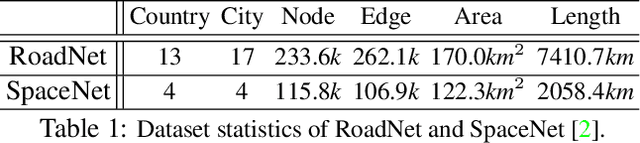
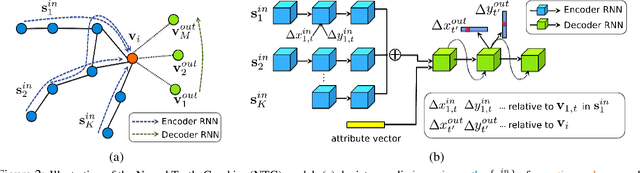
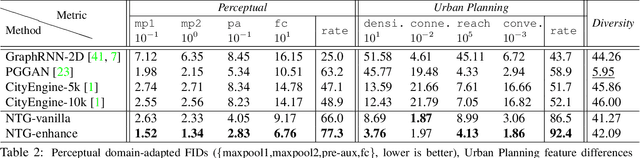
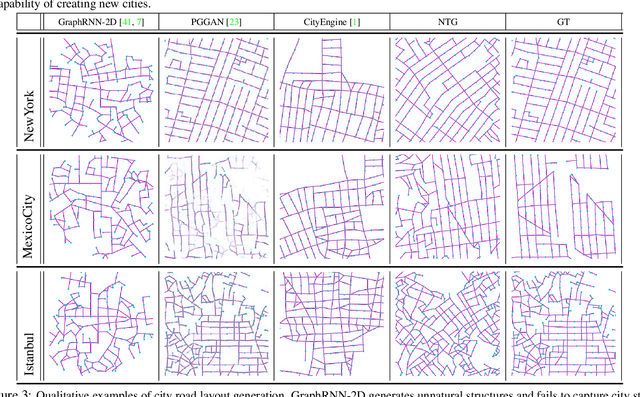
We propose Neural Turtle Graphics (NTG), a novel generative model for spatial graphs, and demonstrate its applications in modeling city road layouts. Specifically, we represent the road layout using a graph where nodes in the graph represent control points and edges in the graph represent road segments. NTG is a sequential generative model parameterized by a neural network. It iteratively generates a new node and an edge connecting to an existing node conditioned on the current graph. We train NTG on Open Street Map data and show that it outperforms existing approaches using a set of diverse performance metrics. Moreover, our method allows users to control styles of generated road layouts mimicking existing cities as well as to sketch parts of the city road layout to be synthesized. In addition to synthesis, the proposed NTG finds uses in an analytical task of aerial road parsing. Experimental results show that it achieves state-of-the-art performance on the SpaceNet dataset.