 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIsaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
Nov 06, 2025



We present Isaac Lab, the natural successor to Isaac Gym, which extends the paradigm of GPU-native robotics simulation into the era of large-scale multi-modal learning. Isaac Lab combines high-fidelity GPU parallel physics, photorealistic rendering, and a modular, composable architecture for designing environments and training robot policies. Beyond physics and rendering, the framework integrates actuator models, multi-frequency sensor simulation, data collection pipelines, and domain randomization tools, unifying best practices for reinforcement and imitation learning at scale within a single extensible platform. We highlight its application to a diverse set of challenges, including whole-body control, cross-embodiment mobility, contact-rich and dexterous manipulation, and the integration of human demonstrations for skill acquisition. Finally, we discuss upcoming integration with the differentiable, GPU-accelerated Newton physics engine, which promises new opportunities for scalable, data-efficient, and gradient-based approaches to robot learning. We believe Isaac Lab's combination of advanced simulation capabilities, rich sensing, and data-center scale execution will help unlock the next generation of breakthroughs in robotics research.
Latent Heterogeneous Graph Network for Incomplete Multi-View Learning
Aug 29, 2022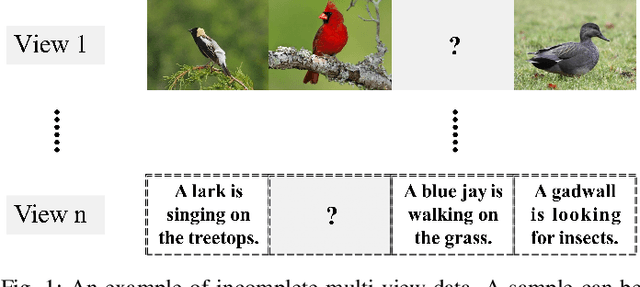
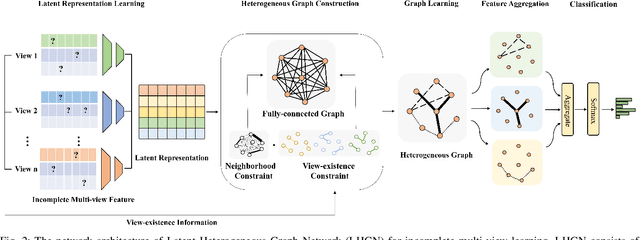
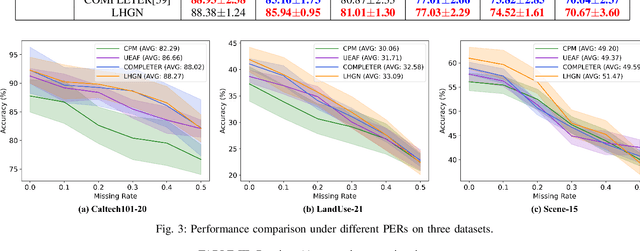

Multi-view learning has progressed rapidly in recent years. Although many previous studies assume that each instance appears in all views, it is common in real-world applications for instances to be missing from some views, resulting in incomplete multi-view data. To tackle this problem, we propose a novel Latent Heterogeneous Graph Network (LHGN) for incomplete multi-view learning, which aims to use multiple incomplete views as fully as possible in a flexible manner. By learning a unified latent representation, a trade-off between consistency and complementarity among different views is implicitly realized. To explore the complex relationship between samples and latent representations, a neighborhood constraint and a view-existence constraint are proposed, for the first time, to construct a heterogeneous graph. Finally, to avoid any inconsistencies between training and test phase, a transductive learning technique is applied based on graph learning for classification tasks. Extensive experimental results on real-world datasets demonstrate the effectiveness of our model over existing state-of-the-art approaches.
* 13 pages, 9 figures, IEEE Transactions on Multimedia
RCA: Ride Comfort-Aware Visual Navigation via Self-Supervised Learning
Jul 29, 2022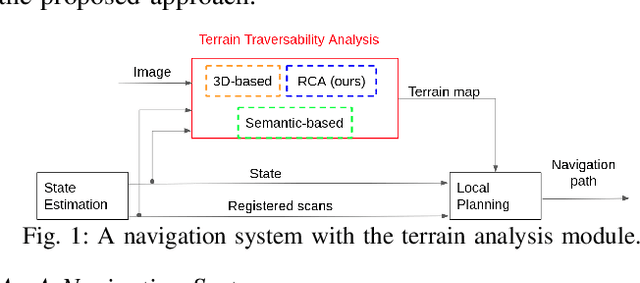
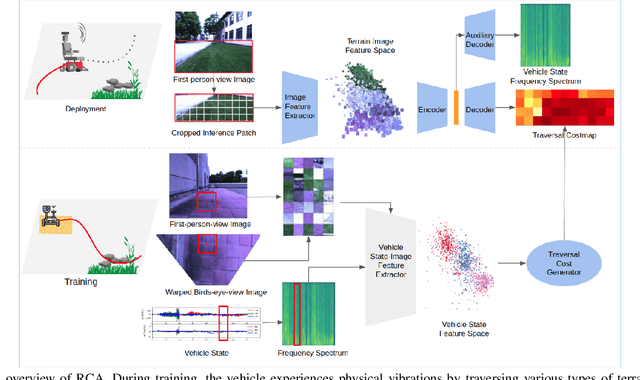
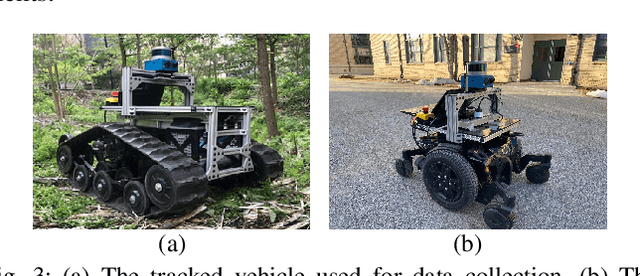
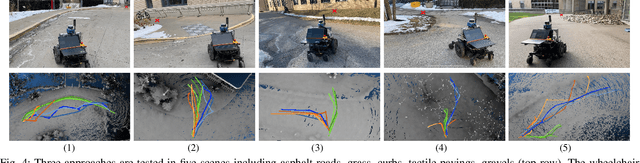
Under shared autonomy, wheelchair users expect vehicles to provide safe and comfortable rides while following users high-level navigation plans. To find such a path, vehicles negotiate with different terrains and assess their traversal difficulty. Most prior works model surroundings either through geometric representations or semantic classifications, which do not reflect perceived motion intensity and ride comfort in downstream navigation tasks. We propose to model ride comfort explicitly in traversability analysis using proprioceptive sensing. We develop a self-supervised learning framework to predict traversability costmap from first-person-view images by leveraging vehicle states as training signals. Our approach estimates how the vehicle would feel if traversing over based on terrain appearances. We then show our navigation system provides human-preferred ride comfort through robot experiments together with a human evaluation study.
Omni-swarm: A Decentralized Omnidirectional Visual-Inertial-UWB State Estimation System for Aerial Swarm
Apr 04, 2021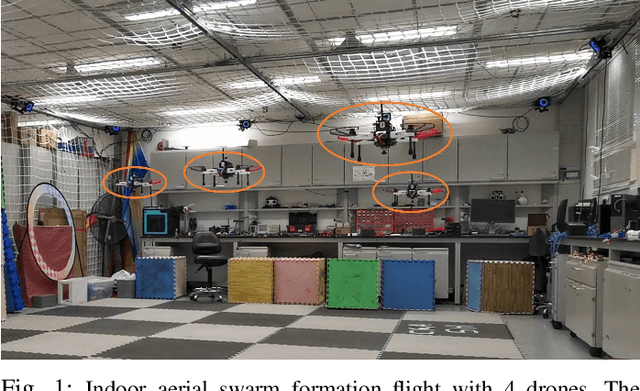
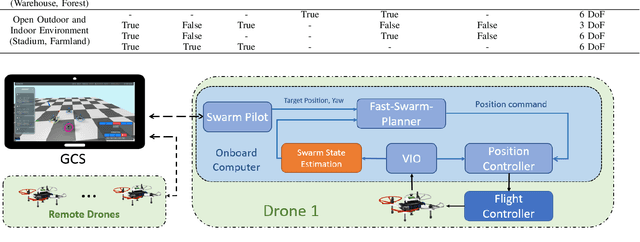
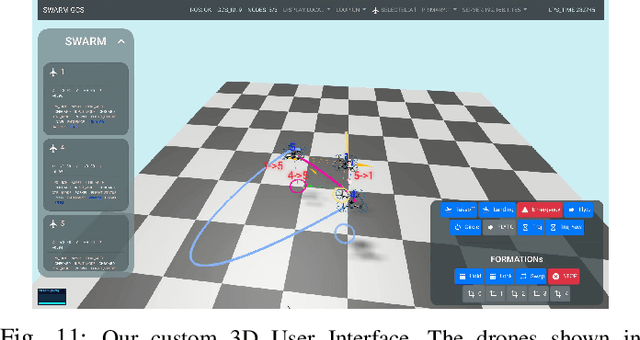
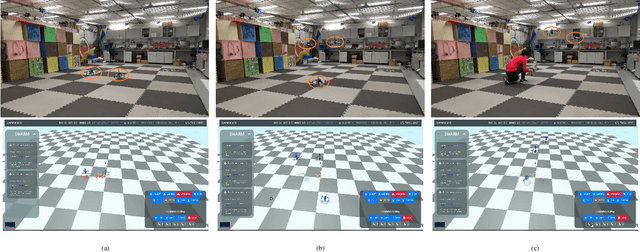
The decentralized state estimation is one of the most fundamental components for autonomous aerial swarm systems in GPS-denied areas, which still remains a highly challenging research topic. To address this research niche, the Omni-swarm, a decentralized omnidirectional visual-inertial-UWB state estimation system for the aerial swarm is proposed in this paper. In order to solve the issues of observability, complicated initialization, insufficient accuracy and lack of global consistency, we introduce an omnidirectional perception system as the front-end of the Omni-swarm, consisting of omnidirectional sensors, which includes stereo fisheye cameras and ultra-wideband (UWB) sensors, and algorithms, which includes fisheye visual inertial odometry (VIO), multi-drone map-based localization and visual object detector. A graph-based optimization and forward propagation working as the back-end of the Omni-swarm to fuse the measurements from the front-end. According to the experiment result, the proposed decentralized state estimation method on the swarm system achieves centimeter-level relative state estimation accuracy while ensuring global consistency. Moreover, supported by the Omni-swarm, inter-drone collision avoidance can be accomplished in a whole decentralized scheme without any external device, demonstrating the potential of Omni-swarm to be the foundation of autonomous aerial swarm flights in different scenarios.
Following Social Groups: Socially Compliant Autonomous Navigation in Dense Crowds
Nov 27, 2019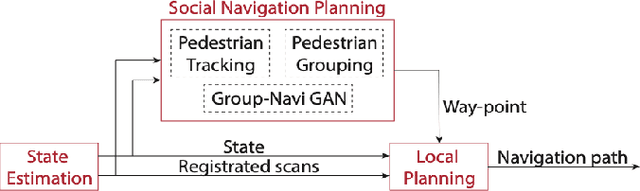
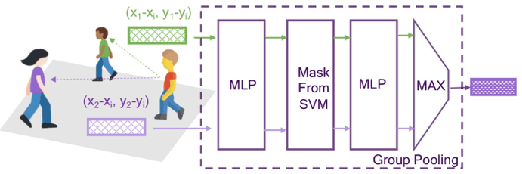
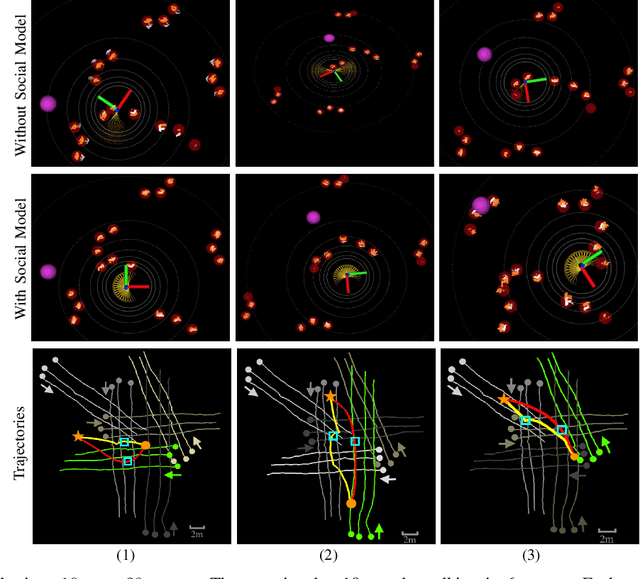

In densely populated environments, socially compliant navigation is critical for autonomous robots as driving close to people is unavoidable. This manner of social navigation is challenging given the constraints of human comfort and social rules. Traditional methods based on hand-craft cost functions to achieve this task have difficulties to operate in the complex real world. Other learning-based approaches fail to address the naturalness aspect from the perspective of collective formation behaviors. We present an autonomous navigation system capable of operating in dense crowds and utilizing information of social groups. The underlying system incorporates a deep neural network to track social groups and join the flow of a social group in facilitating the navigation. A collision avoidance layer in the system further ensures navigation safety. In experiments, our method generates socially compliant behaviors as state-of-the-art methods. More importantly, the system is capable of navigating safely in a densely populated area (10+ people in a 10m x 20m area) following crowd flows to reach the goal.