 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Bioinspired Bidirectional Stiffening Soft Actuator for Multimodal, Compliant, and Robust Grasping
Nov 22, 2022The stiffness modulation mechanism for soft robotics has gained considerable attention to improve deformability, controllability, and stability. However, for the existing stiffness soft actuator, high lateral stiffness and a wide range of bending stiffness are hard to be provided at the same time. This paper presents a bioinspired bidirectional stiffening soft actuator (BISA) combining the air-tendon hybrid actuation (ATA) and a bone-like structure (BLS). The ATA is the main actuation of the BISA, and the bending stiffness can be modulated with a maximum stiffness of about 0.7 N/mm and a maximum magnification of 3 times when the bending angle is 45 deg. Inspired by the morphological structure of the phalanx, the lateral stiffness can be modulated by changing the pulling force of the BLS. The lateral stiffness can be modulated by changing the pulling force to it. The actuator with BLSs can improve the lateral stiffness about 3.9 times compared to the one without BLSs. The maximum lateral stiffness can reach 0.46 N/mm. And the lateral stiffness can be modulated decoupling about 1.3 times (e.g., from 0.35 N/mm to 0.46 when the bending angle is 45 deg). The test results show the influence of the rigid structures on bending is small with about 1.5 mm maximum position errors of the distal point of actuator bending in different pulling forces. The advantages brought by the proposed method enable a soft four-finger gripper to operate in three modes: normal grasping, inverse grasping, and horizontal lifting. The performance of this gripper is further characterized and versatile grasping on various objects is conducted, proving the robust performance and potential application of the proposed design method.
Learning Grasp Ability Enhancement through Deep Shape Generation
Jun 19, 2022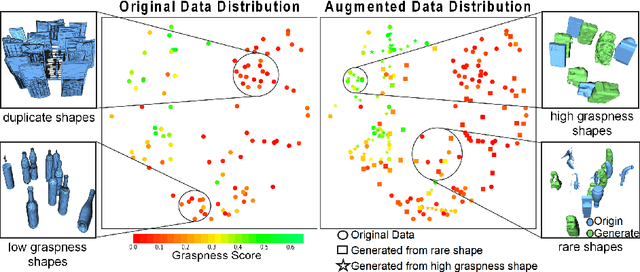
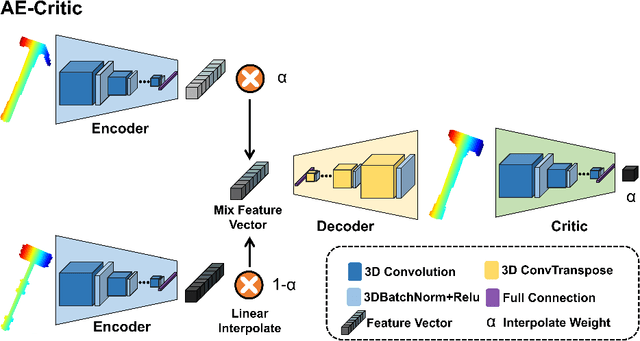
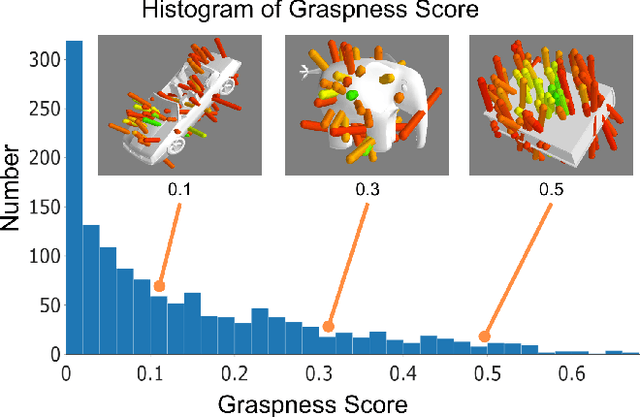
Data-driven especially deep learning-based approaches have become a dominant paradigm for robotic grasp planning during the past decade. However, the performance of these methods is greatly influenced by the quality of the training dataset available. In this paper, we propose a framework to generate object shapes to augment the grasping dataset and thus can improve the grasp ability of a pre-designed deep neural network. First, the object shapes are embedded into a low dimensional feature space using an encoder-decoder structure network. Then, the rarity and graspness scores are computed for each object shape using outlier detection and grasp quality criteria. Finally, new objects are generated in feature space leveraging the original high rarity and graspness score objects' feature. Experimental results show that the grasp ability of a deep-learning-based grasp planning network can be effectively improved with the generated object shapes.
Learning Dynamical System for Grasping Motion
Aug 15, 2021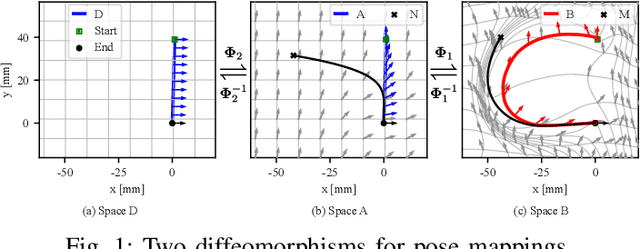
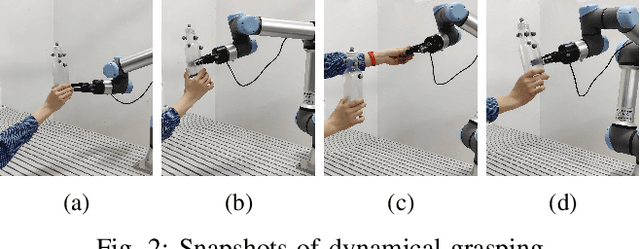
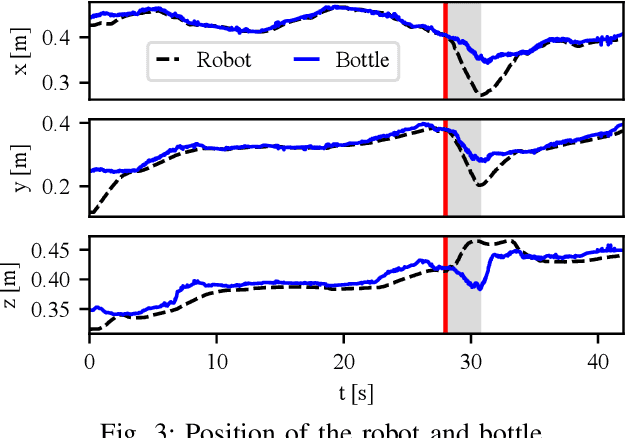
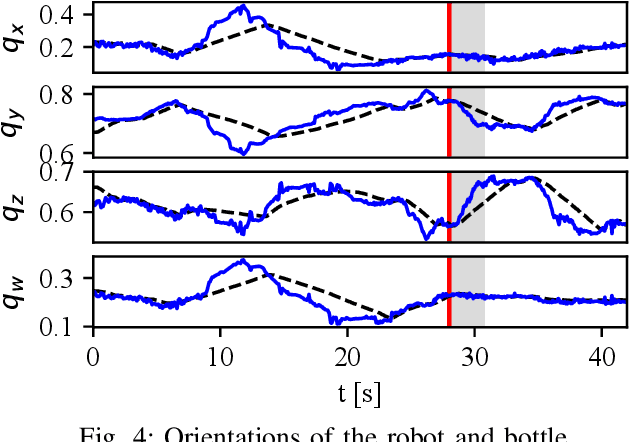
Dynamical System has been widely used for encoding trajectories from human demonstration, which has the inherent adaptability to dynamically changing environments and robustness to perturbations. In this paper we propose a framework to learn a dynamical system that couples position and orientation based on a diffeomorphism. Different from other methods, it can realise the synchronization between positon and orientation during the whole trajectory. Online grasping experiments are carried out to prove its effectiveness and online adaptability.
Motion Mappings for Continuous Bilateral Teleoperation
Dec 11, 2020
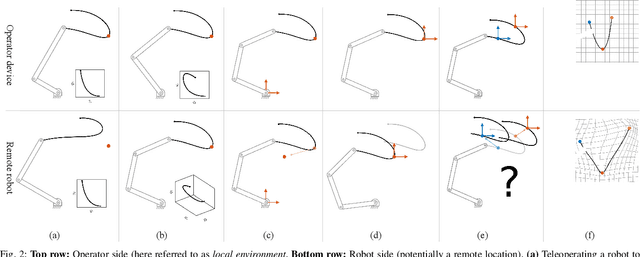


Mapping operator motions to a robot is a key problem in teleoperation. Due to differences between workspaces, such as object locations, it is particularly challenging to derive smooth motion mappings that fulfill different goals (e.g. picking objects with different poses on the two sides or passing through key points). Indeed, most state-of-the-art methods rely on mode switches, leading to a discontinuous, low-transparency experience. In this paper, we propose a unified formulation for position, orientation and velocity mappings based on the poses of objects of interest in the operator and robot workspaces. We apply it in the context of bilateral teleoperation. Two possible implementations to achieve the proposed mappings are studied: an iterative approach based on locally-weighted translations and rotations, and a neural network approach. Evaluations are conducted both in simulation and using two torque-controlled Franka Emika Panda robots. Our results show that, despite longer training times, the neural network approach provides faster mapping evaluations and lower interaction forces for the operator, which are crucial for continuous, real-time teleoperation.
Nonlinear Model Predictive Control for Robust Bipedal Locomotion Exploring CoM Height and Angular Momentum Changes
Feb 18, 2019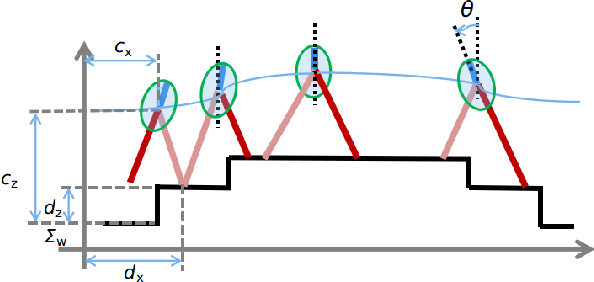
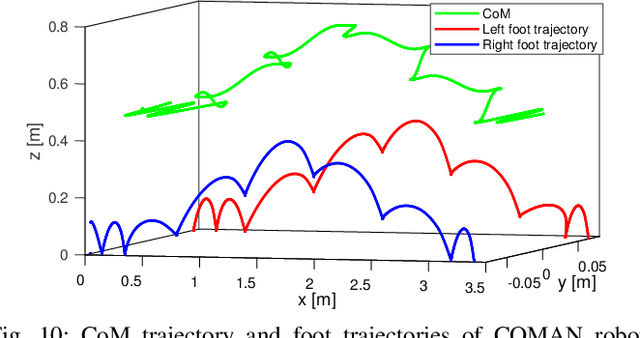
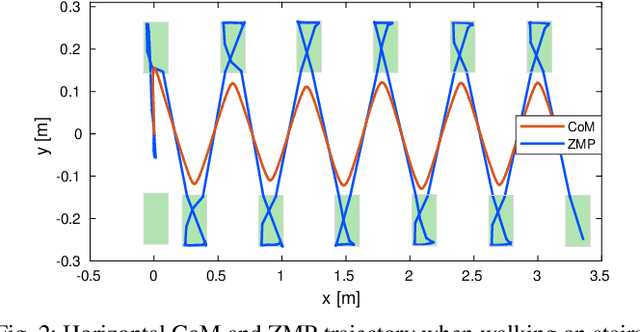
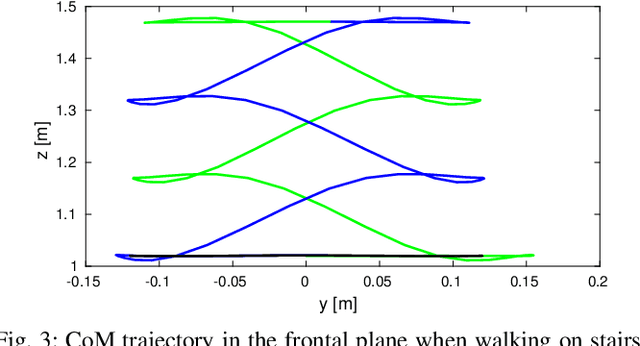
Human beings can make use of various reactive strategies, e.g. foot location adjustment and upper-body inclination, to keep balance while walking under dynamic disturbances. In this work, we propose a novel Nonlinear Model Predictive Control (NMPC) framework for versatile bipedal gait pattern generation, with the capabilities of footstep adjustment, Center of Mass (CoM) height variation and angular momentum adaptation. These features are realized by constraining the Zero Moment Point motion with considering the variable CoM height and angular momentum change of the Inverted Pendulum plus Flywheel Model. In addition, the NMPC framework also takes into account the constraints of footstep location, CoM vertical motion, upper-body inclination and joint torques, and is finally formulated as a quadratically constrained quadratic program. Therefore, it can be solved efficiently by Sequential Quadratic Programming. Using this unified framework, versatile walking pattern with exploiting time-varying CoM height trajectory and angular momentum changes can be generated based only on the terrain information input. Furthermore, the improved capability for balance recovery under external pushes has been demonstrated through simulation studies.