 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Sensorised Lattice Footplate for a Semi-Active Prosthetic Foot
Jun 24, 2026This paper investigates whether magnetic plantar sensing can be embedded directly inside the load-bearing compliant element of a low-cost semi-active prosthetic foot. We present a prototype integrating a sensorised 3D-printed lattice footplate, a servo-adjustable hydraulic damper, and a reduced-order ankle model. The damper is experimentally characterised to relate adjustment angle to damping coefficient. Controlled compression tests show tunable lattice stiffness, while cyclic normal loading shows that the embedded sensor tracks the testing-machine reference force, supporting plantar-force estimation without an external insole layer. Static-posture trials under approximately body-weight loading show that forefoot and rearfoot loading distributions are separable across four prescribed stance configurations, providing a preliminary check of the sensing pipeline. A feedforward damping schedule approximates the dorsiflexion trend of a reference ankle trajectory through early-to-mid stance, while exposing the expected limitation that a purely dissipative mechanism cannot generate active push-off. Together, these results demonstrate that sensing can be embedded inside the load-bearing compliant element of a prosthetic foot and used to drive semi-active damping.
Quadruped Parkour Learning: Sparsely Gated Mixture of Experts with Visual Input
Apr 21, 2026Robotic parkour provides a compelling benchmark for advancing locomotion over highly challenging terrain, including large discontinuities such as elevated steps. Recent approaches have demonstrated impressive capabilities, including dynamic climbing and jumping, but typically rely on sequential multilayer perceptron (MLP) architectures with densely activated layers. In contrast, sparsely gated mixture-of-experts (MoE) architectures have emerged in the large language model domain as an effective paradigm for improving scalability and performance by activating only a subset of parameters at inference time. In this work, we investigate the application of sparsely gated MoE architectures to vision-based robotic parkour. We compare control policies based on standard MLPs and MoE architectures under a controlled setting where the number of active parameters at inference time is matched. Experimental results on a real Unitree Go2 quadruped robot demonstrate clear performance gains, with the MoE policy achieving double the number of successful trials in traversing large obstacles compared to a standard MLP baseline. We further show that achieving comparable performance with a standard MLP requires scaling its parameter count to match that of the total MoE model, resulting in a 14.3\% increase in computation time. These results highlight that sparsely gated MoE architectures provide a favorable trade-off between performance and computational efficiency, enabling improved scaling of control policies for vision-based robotic parkour. An anonymized link to the codebase is https://osf.io/v2kqj/files/github?view_only=7977dee10c0a44769184498eaba72e44.
SCDP: Learning Humanoid Locomotion from Partial Observations via Mixed-Observation Distillation
Mar 10, 2026Distilling humanoid locomotion control from offline datasets into deployable policies remains a challenge, as existing methods rely on privileged full-body states that require complex and often unreliable state estimation. We present Sensor-Conditioned Diffusion Policies (SCDP) that enables humanoid locomotion using only onboard sensors, eliminating the need for explicit state estimation. SCDP decouples sensing from supervision through mixed-observation training: diffusion model conditions on sensor histories while being supervised to predict privileged future state-action trajectories, enforcing the model to infer the motion dynamics under partial observability. We further develop restricted denoising, context distribution alignment, and context-aware attention masking to encourage implicit state estimation within the model and to prevent train-deploy mismatch. We validate SCDP on velocity-commanded locomotion and motion reference tracking tasks. In simulation, SCDP achieves near-perfect success on velocity control (99-100%) and 93% tracking success in AMASS test set, performing comparable to privileged baselines while using only onboard sensors. Finally, we deploy the trained policy on a real G1 humanoid at 50 Hz, demonstrating robust real robot locomotion without external sensing or state estimation.
A High-Fidelity Digital Twin for Robotic Manipulation Based on 3D Gaussian Splatting
Jan 06, 2026Developing high-fidelity, interactive digital twins is crucial for enabling closed-loop motion planning and reliable real-world robot execution, which are essential to advancing sim-to-real transfer. However, existing approaches often suffer from slow reconstruction, limited visual fidelity, and difficulties in converting photorealistic models into planning-ready collision geometry. We present a practical framework that constructs high-quality digital twins within minutes from sparse RGB inputs. Our system employs 3D Gaussian Splatting (3DGS) for fast, photorealistic reconstruction as a unified scene representation. We enhance 3DGS with visibility-aware semantic fusion for accurate 3D labelling and introduce an efficient, filter-based geometry conversion method to produce collision-ready models seamlessly integrated with a Unity-ROS2-MoveIt physics engine. In experiments with a Franka Emika Panda robot performing pick-and-place tasks, we demonstrate that this enhanced geometric accuracy effectively supports robust manipulation in real-world trials. These results demonstrate that 3DGS-based digital twins, enriched with semantic and geometric consistency, offer a fast, reliable, and scalable path from perception to manipulation in unstructured environments.
E-SDS: Environment-aware See it, Do it, Sorted - Automated Environment-Aware Reinforcement Learning for Humanoid Locomotion
Dec 18, 2025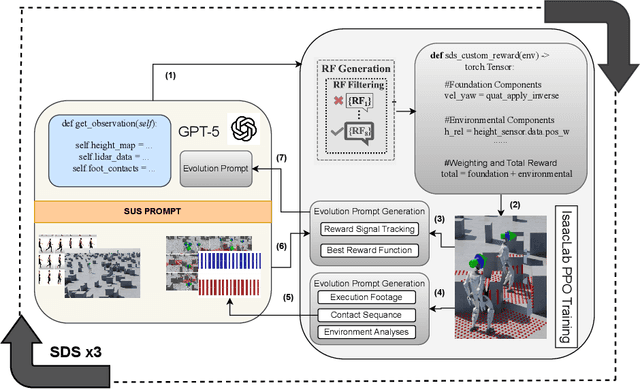
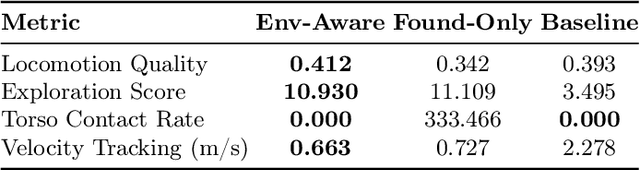
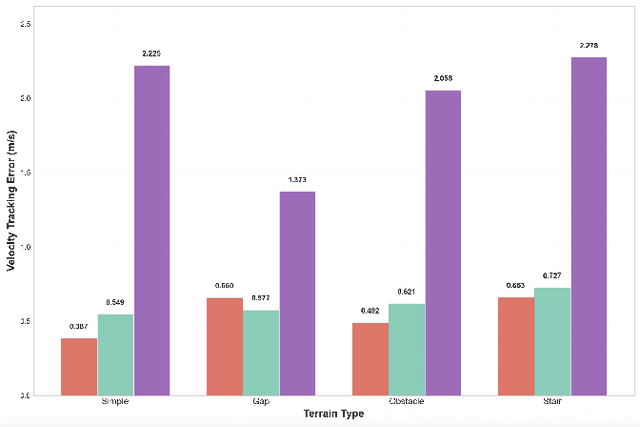
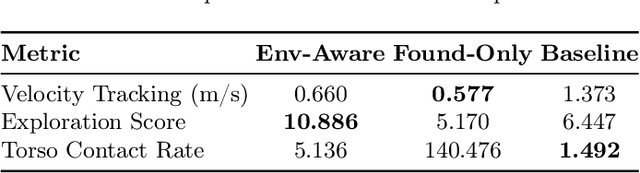
Vision-language models (VLMs) show promise in automating reward design in humanoid locomotion, which could eliminate the need for tedious manual engineering. However, current VLM-based methods are essentially "blind", as they lack the environmental perception required to navigate complex terrain. We present E-SDS (Environment-aware See it, Do it, Sorted), a framework that closes this perception gap. E-SDS integrates VLMs with real-time terrain sensor analysis to automatically generate reward functions that facilitate training of robust perceptive locomotion policies, grounded by example videos. Evaluated on a Unitree G1 humanoid across four distinct terrains (simple, gaps, obstacles, stairs), E-SDS uniquely enabled successful stair descent, while policies trained with manually-designed rewards or a non-perceptive automated baseline were unable to complete the task. In all terrains, E-SDS also reduced velocity tracking error by 51.9-82.6%. Our framework reduces the human effort of reward design from days to less than two hours while simultaneously producing more robust and capable locomotion policies.
* 12 pages, 3 figures, 4 tables. Accepted at RiTA 2025 (Springer LNNS)
Self-Motivated Growing Neural Network for Adaptive Architecture via Local Structural Plasticity
Dec 14, 2025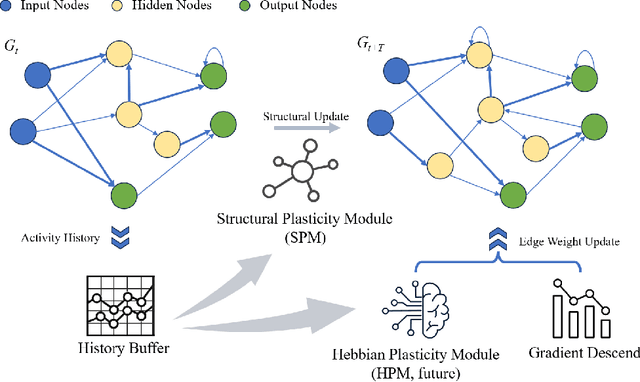

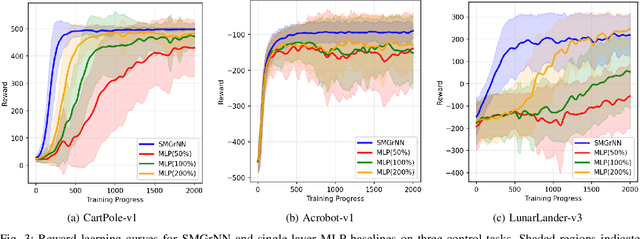
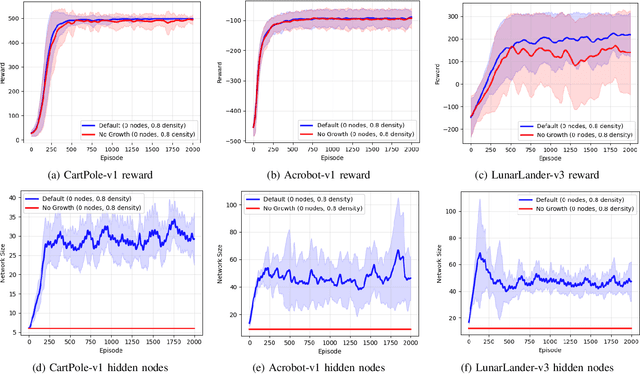
Control policies in deep reinforcement learning are often implemented with fixed-capacity multilayer perceptrons trained by backpropagation, which lack structural plasticity and depend on global error signals. This paper introduces the Self-Motivated Growing Neural Network (SMGrNN), a controller whose topology evolves online through a local Structural Plasticity Module (SPM). The SPM monitors neuron activations and edge-wise weight update statistics over short temporal windows and uses these signals to trigger neuron insertion and pruning, while synaptic weights are updated by a standard gradient-based optimizer. This allows network capacity to be regulated during learning without manual architectural tuning. SMGrNN is evaluated on control benchmarks via policy distillation. Compared with multilayer perceptron baselines, it achieves similar or higher returns, lower variance, and task-appropriate network sizes. Ablation studies with growth disabled and growth-only variants isolate the role of structural plasticity, showing that adaptive topology improves reward stability. The local and modular design of SPM enables future integration of a Hebbian plasticity module and spike-timing-dependent plasticity, so that SMGrNN can support both artificial and spiking neural implementations driven by local rules.
Learning to Adapt: Bio-Inspired Gait Strategies for Versatile Quadruped Locomotion
Dec 12, 2024



Deep reinforcement learning (DRL) has revolutionised quadruped robot locomotion, but existing control frameworks struggle to generalise beyond their training-induced observational scope, resulting in limited adaptability. In contrast, animals achieve exceptional adaptability through gait transition strategies, diverse gait utilisation, and seamless adjustment to immediate environmental demands. Inspired by these capabilities, we present a novel DRL framework that incorporates key attributes of animal locomotion: gait transition strategies, pseudo gait procedural memory, and adaptive motion adjustments. This approach enables our framework to achieve unparalleled adaptability, demonstrated through blind zero-shot deployment on complex terrains and recovery from critically unstable states. Our findings offer valuable insights into the biomechanics of animal locomotion, paving the way for robust, adaptable robotic systems.
Learning Bipedal Walking on a Quadruped Robot via Adversarial Motion Priors
Jul 02, 2024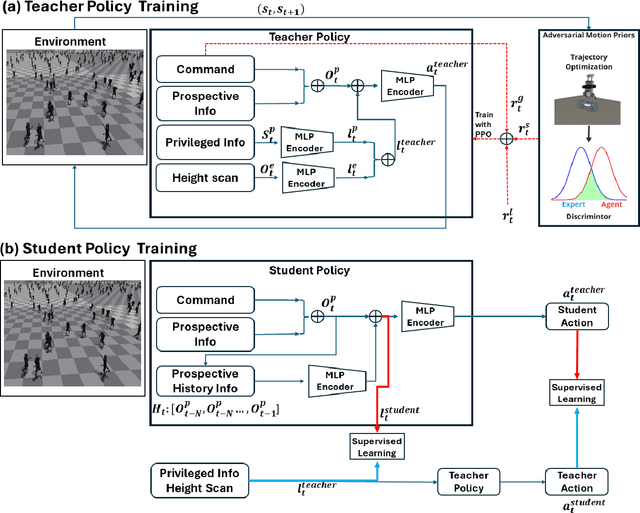
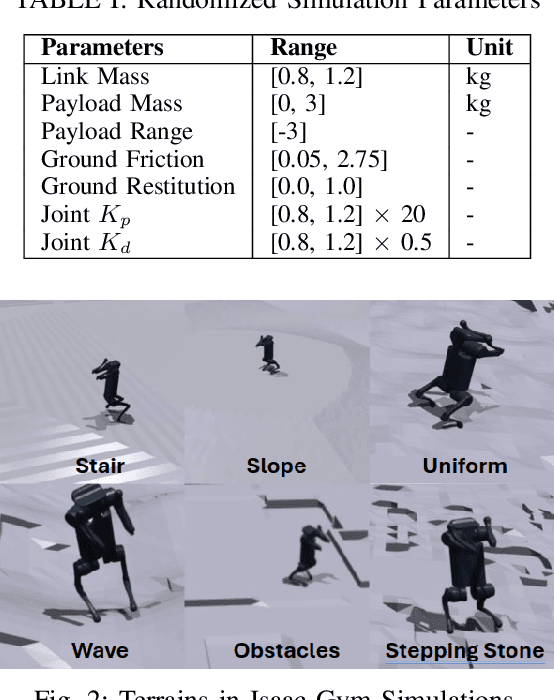
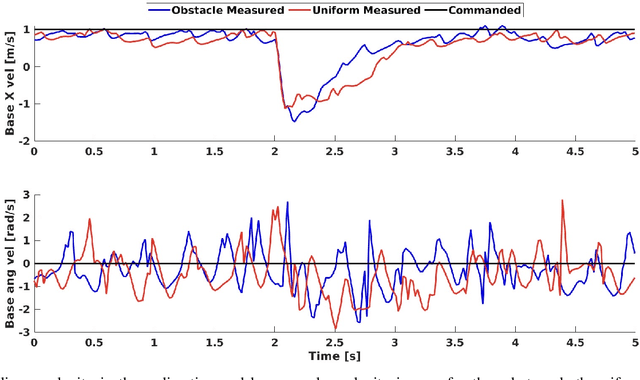
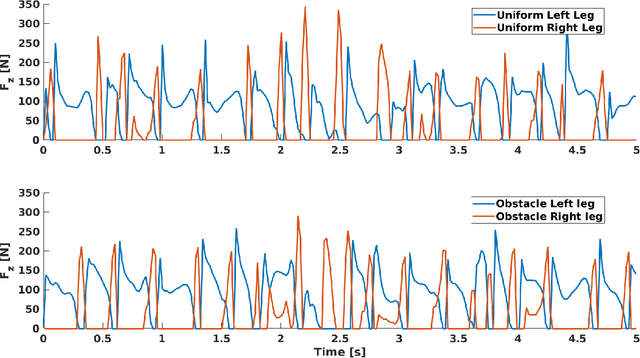
Previous studies have successfully demonstrated agile and robust locomotion in challenging terrains for quadrupedal robots. However, the bipedal locomotion mode for quadruped robots remains unverified. This paper explores the adaptation of a learning framework originally designed for quadrupedal robots to operate blind locomotion in biped mode. We leverage a framework that incorporates Adversarial Motion Priors with a teacher-student policy to enable imitation of a reference trajectory and navigation on tough terrain. Our work involves transferring and evaluating a similar learning framework on a quadruped robot in biped mode, aiming to achieve stable walking on both flat and complicated terrains. Our simulation results demonstrate that the trained policy enables the quadruped robot to navigate both flat and challenging terrains, including stairs and uneven surfaces.
Deep Reinforcement Learning for Bipedal Locomotion: A Brief Survey
Apr 25, 2024



Bipedal robots are garnering increasing global attention due to their potential applications and advancements in artificial intelligence, particularly in Deep Reinforcement Learning (DRL). While DRL has driven significant progress in bipedal locomotion, developing a comprehensive and unified framework capable of adeptly performing a wide range of tasks remains a challenge. This survey systematically categorizes, compares, and summarizes existing DRL frameworks for bipedal locomotion, organizing them into end-to-end and hierarchical control schemes. End-to-end frameworks are assessed based on their learning approaches, whereas hierarchical frameworks are dissected into layers that utilize either learning-based methods or traditional model-based approaches. This survey provides a detailed analysis of the composition, capabilities, strengths, and limitations of each framework type. Furthermore, we identify critical research gaps and propose future directions aimed at achieving a more integrated and efficient framework for bipedal locomotion, with potential broad applications in everyday life.
A New Image Quality Database for Multiple Industrial Processes
Jan 29, 2024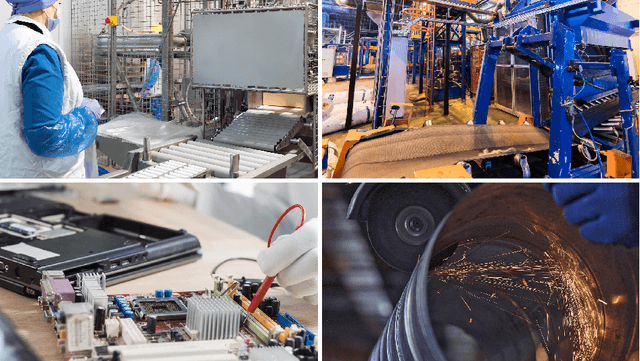
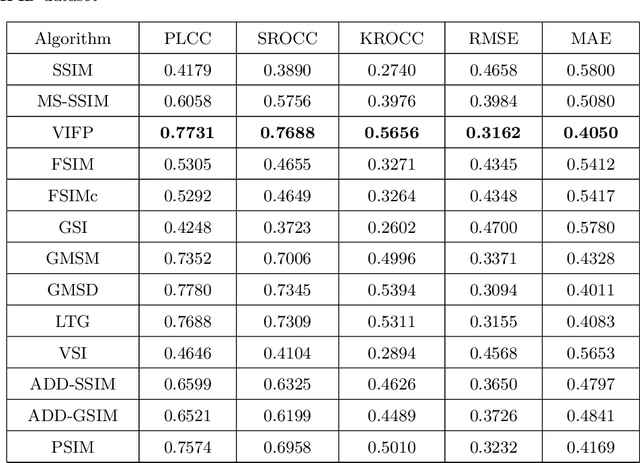
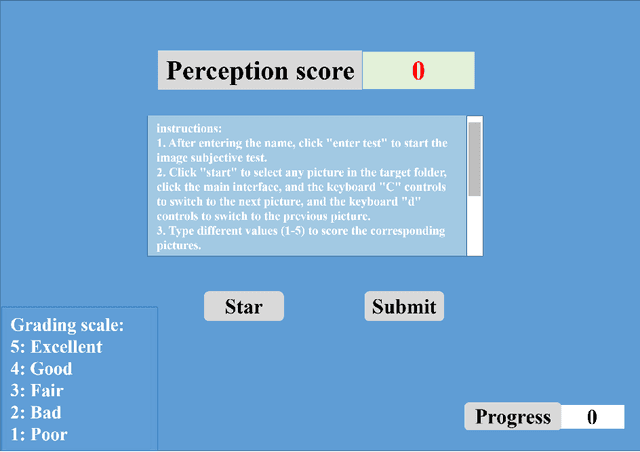
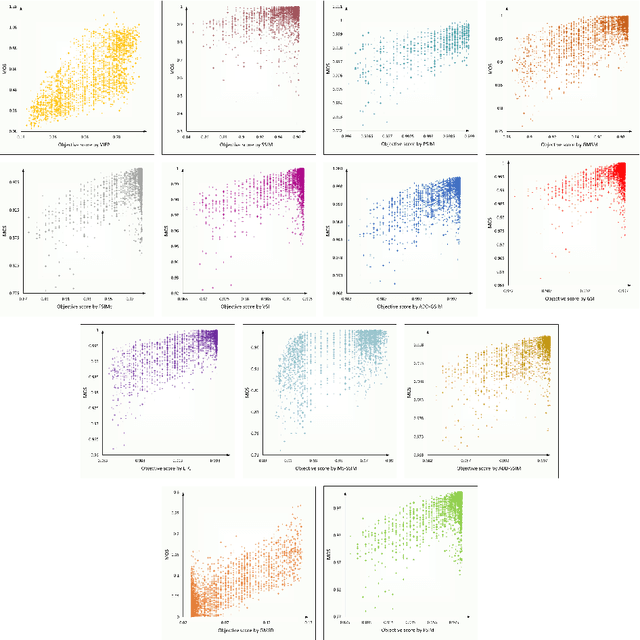
Recent years have witnessed a broader range of applications of image processing technologies in multiple industrial processes, such as smoke detection, security monitoring, and workpiece inspection. Different kinds of distortion types and levels must be introduced into an image during the processes of acquisition, compression, transmission, storage, and display, which might heavily degrade the image quality and thus strongly reduce the final display effect and clarity. To verify the reliability of existing image quality assessment methods, we establish a new industrial process image database (IPID), which contains 3000 distorted images generated by applying different levels of distortion types to each of the 50 source images. We conduct the subjective test on the aforementioned 3000 images to collect their subjective quality ratings in a well-suited laboratory environment. Finally, we perform comparison experiments on IPID database to investigate the performance of some objective image quality assessment algorithms. The experimental results show that the state-of-the-art image quality assessment methods have difficulty in predicting the quality of images that contain multiple distortion types.