 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear Model Predictive Control for Robust Bipedal Locomotion Exploring CoM Height and Angular Momentum Changes
Paper and Code
Feb 18, 2019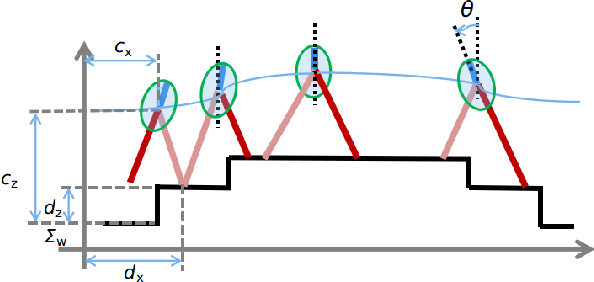
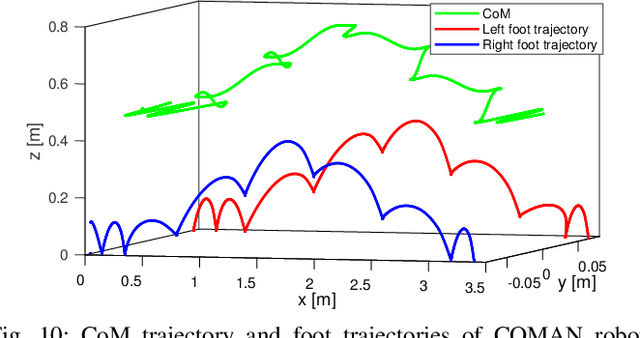
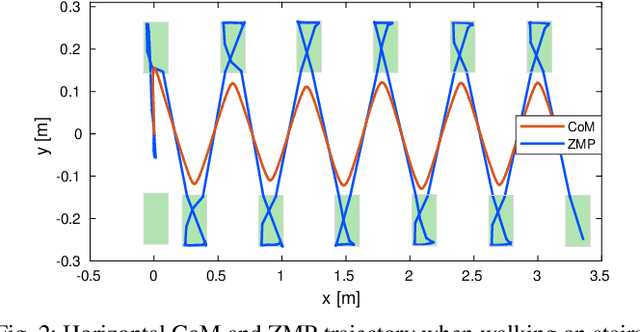
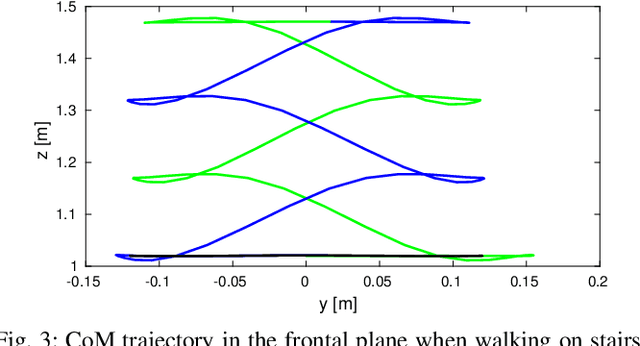
Human beings can make use of various reactive strategies, e.g. foot location adjustment and upper-body inclination, to keep balance while walking under dynamic disturbances. In this work, we propose a novel Nonlinear Model Predictive Control (NMPC) framework for versatile bipedal gait pattern generation, with the capabilities of footstep adjustment, Center of Mass (CoM) height variation and angular momentum adaptation. These features are realized by constraining the Zero Moment Point motion with considering the variable CoM height and angular momentum change of the Inverted Pendulum plus Flywheel Model. In addition, the NMPC framework also takes into account the constraints of footstep location, CoM vertical motion, upper-body inclination and joint torques, and is finally formulated as a quadratically constrained quadratic program. Therefore, it can be solved efficiently by Sequential Quadratic Programming. Using this unified framework, versatile walking pattern with exploiting time-varying CoM height trajectory and angular momentum changes can be generated based only on the terrain information input. Furthermore, the improved capability for balance recovery under external pushes has been demonstrated through simulation studies.