 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROS-LLM: A ROS framework for embodied AI with task feedback and structured reasoning
Jun 28, 2024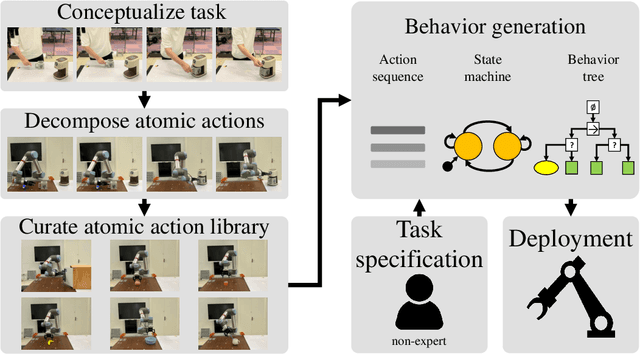
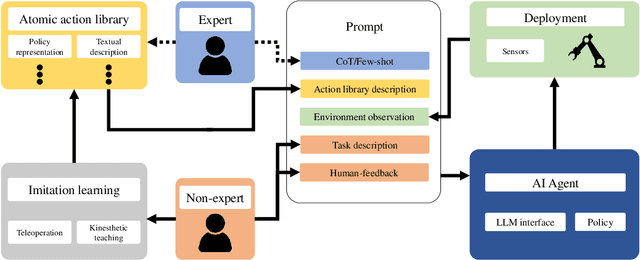
We present a framework for intuitive robot programming by non-experts, leveraging natural language prompts and contextual information from the Robot Operating System (ROS). Our system integrates large language models (LLMs), enabling non-experts to articulate task requirements to the system through a chat interface. Key features of the framework include: integration of ROS with an AI agent connected to a plethora of open-source and commercial LLMs, automatic extraction of a behavior from the LLM output and execution of ROS actions/services, support for three behavior modes (sequence, behavior tree, state machine), imitation learning for adding new robot actions to the library of possible actions, and LLM reflection via human and environment feedback. Extensive experiments validate the framework, showcasing robustness, scalability, and versatility in diverse scenarios, including long-horizon tasks, tabletop rearrangements, and remote supervisory control. To facilitate the adoption of our framework and support the reproduction of our results, we have made our code open-source. You can access it at: https://github.com/huawei-noah/HEBO/tree/master/ROSLLM.
Web-based Experiment on Human Performance in Dual-Robot Teleoperation
Dec 13, 2022In most cases, upgrading from a single-robot system to a multi-robot system comes with increases in system payload and task performance. On the other hand, many multi-robot systems in open environments still rely on teleoperation. Therefore, human performance can be the bottleneck in a teleoperated multi-robot system. Based on this idea, the multi-robot system's shared autonomy and control methods are emerging research areas in open environment robot operations. However, the question remains: how much does the bottleneck of the human agent impact the system performance in a multi-robot system? This research tries to explore the question through the performance comparison of teleoperating a single-robot system and a dual-robot system in a box-pushing task. This robot teleoperation experiment on human agents employs a web-based environment to simulate the robots' two-dimensional movement. The result provides evidence of the hardship for a single human when teleoperating with more than one robot, which indicates the necessity of shared autonomy in multi-robot systems.
TeLeMan: Teleoperation for Legged Robot Loco-Manipulation using Wearable IMU-based Motion Capture
Sep 21, 2022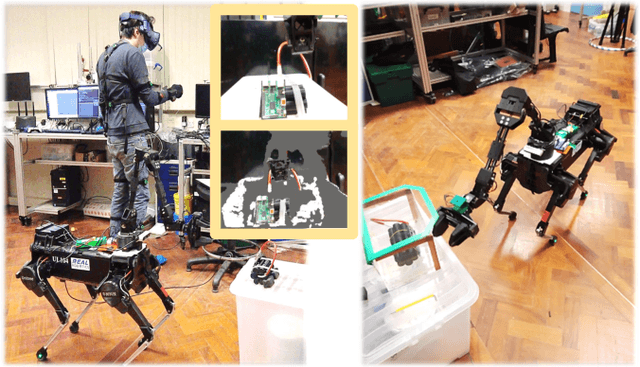
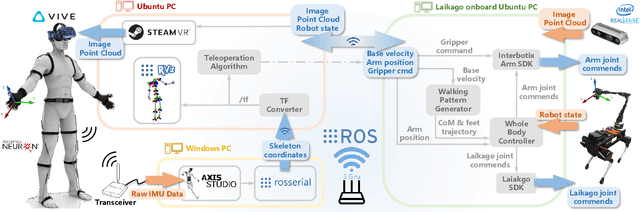
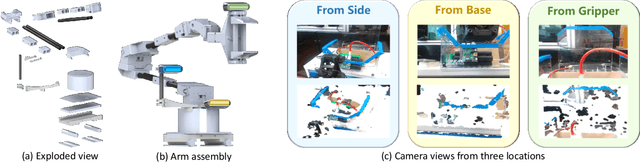
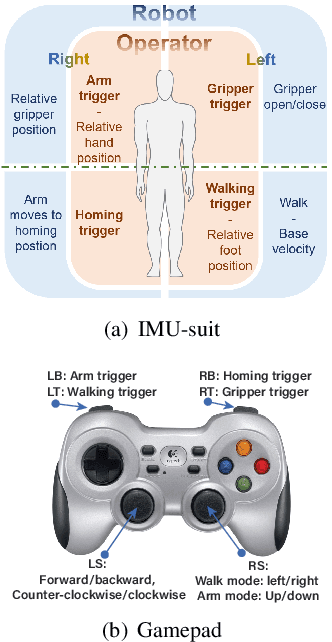
Human life is invaluable. When dangerous or life-threatening tasks need to be completed, robotic platforms could be ideal in replacing human operators. Such a task that we focus on in this work is the Explosive Ordnance Disposal. Robot telepresence has the potential to provide safety solutions, given that mobile robots have shown robust capabilities when operating in several environments. However, autonomy may be challenging and risky at this stage, compared to human operation. Teleoperation could be a compromise between full robot autonomy and human presence. In this paper, we present a relatively cheap solution for telepresence and robot teleoperation, to assist with Explosive Ordnance Disposal, using a legged manipulator (i.e., a legged quadruped robot, embedded with a manipulator and RGB-D sensing). We propose a novel system integration for the non-trivial problem of quadruped manipulator whole-body control. Our system is based on a wearable IMU-based motion capture system that is used for teleoperation and a VR headset for visual telepresence. We experimentally validate our method in real-world, for loco-manipulation tasks that require whole-body robot control and visual telepresence.