 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Adapt: Bio-Inspired Gait Strategies for Versatile Quadruped Locomotion
Dec 12, 2024



Deep reinforcement learning (DRL) has revolutionised quadruped robot locomotion, but existing control frameworks struggle to generalise beyond their training-induced observational scope, resulting in limited adaptability. In contrast, animals achieve exceptional adaptability through gait transition strategies, diverse gait utilisation, and seamless adjustment to immediate environmental demands. Inspired by these capabilities, we present a novel DRL framework that incorporates key attributes of animal locomotion: gait transition strategies, pseudo gait procedural memory, and adaptive motion adjustments. This approach enables our framework to achieve unparalleled adaptability, demonstrated through blind zero-shot deployment on complex terrains and recovery from critically unstable states. Our findings offer valuable insights into the biomechanics of animal locomotion, paving the way for robust, adaptable robotic systems.
Learning Bipedal Walking on a Quadruped Robot via Adversarial Motion Priors
Jul 02, 2024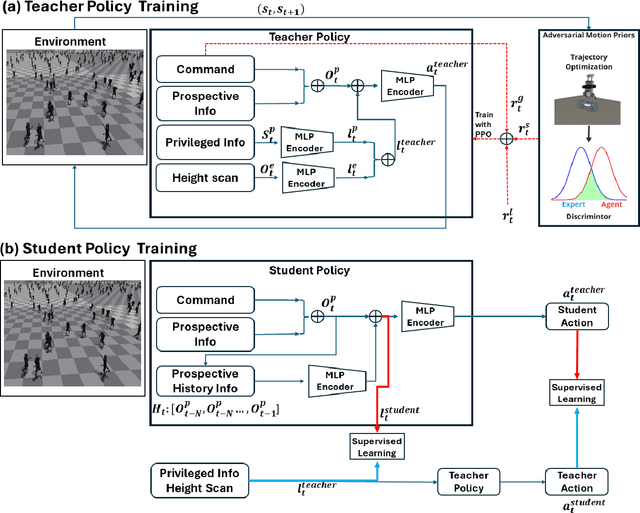
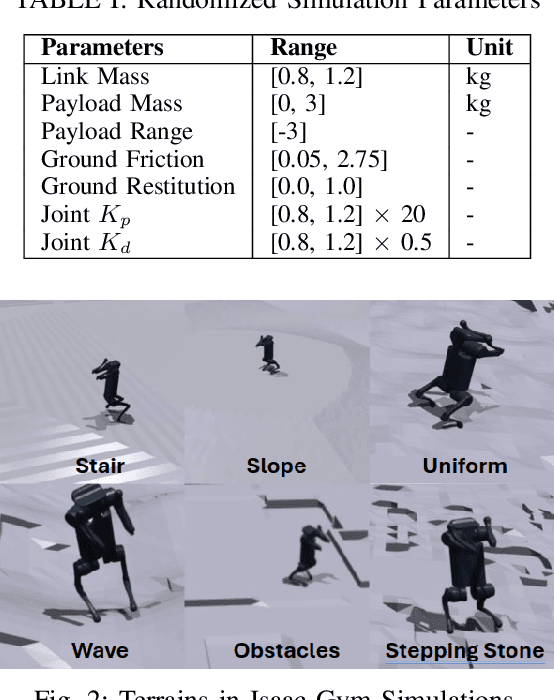
Previous studies have successfully demonstrated agile and robust locomotion in challenging terrains for quadrupedal robots. However, the bipedal locomotion mode for quadruped robots remains unverified. This paper explores the adaptation of a learning framework originally designed for quadrupedal robots to operate blind locomotion in biped mode. We leverage a framework that incorporates Adversarial Motion Priors with a teacher-student policy to enable imitation of a reference trajectory and navigation on tough terrain. Our work involves transferring and evaluating a similar learning framework on a quadruped robot in biped mode, aiming to achieve stable walking on both flat and complicated terrains. Our simulation results demonstrate that the trained policy enables the quadruped robot to navigate both flat and challenging terrains, including stairs and uneven surfaces.
Deep Reinforcement Learning for Bipedal Locomotion: A Brief Survey
Apr 25, 2024



Bipedal robots are garnering increasing global attention due to their potential applications and advancements in artificial intelligence, particularly in Deep Reinforcement Learning (DRL). While DRL has driven significant progress in bipedal locomotion, developing a comprehensive and unified framework capable of adeptly performing a wide range of tasks remains a challenge. This survey systematically categorizes, compares, and summarizes existing DRL frameworks for bipedal locomotion, organizing them into end-to-end and hierarchical control schemes. End-to-end frameworks are assessed based on their learning approaches, whereas hierarchical frameworks are dissected into layers that utilize either learning-based methods or traditional model-based approaches. This survey provides a detailed analysis of the composition, capabilities, strengths, and limitations of each framework type. Furthermore, we identify critical research gaps and propose future directions aimed at achieving a more integrated and efficient framework for bipedal locomotion, with potential broad applications in everyday life.