 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSanD-Planner: Sample-Efficient Diffusion Planner in B-Spline Space for Robust Local Navigation
Jan 31, 2026The challenge of generating reliable local plans has long hindered practical applications in highly cluttered and dynamic environments. Key fundamental bottlenecks include acquiring large-scale expert demonstrations across diverse scenes and improving learning efficiency with limited data. This paper proposes SanD-Planner, a sample-efficient diffusion-based local planner that conducts depth image-based imitation learning within the clamped B-spline space. By operating within this compact space, the proposed algorithm inherently yields smooth outputs with bounded prediction errors over local supports, naturally aligning with receding-horizon execution. Integration of an ESDF-based safety checker with explicit clearance and time-to-completion metrics further reduces the training burden associated with value-function learning for feasibility assessment. Experiments show that training with $500$ episodes (merely $0.25\%$ of the demonstration scale used by the baseline), SanD-Planner achieves state-of-the-art performance on the evaluated open benchmark, attaining success rates of $90.1\%$ in simulated cluttered environments and $72.0\%$ in indoor simulations. The performance is further proven by demonstrating zero-shot transferability to realistic experimentation in both 2D and 3D scenes. The dataset and pre-trained models will also be open-sourced.
A High-Fidelity Digital Twin for Robotic Manipulation Based on 3D Gaussian Splatting
Jan 06, 2026Developing high-fidelity, interactive digital twins is crucial for enabling closed-loop motion planning and reliable real-world robot execution, which are essential to advancing sim-to-real transfer. However, existing approaches often suffer from slow reconstruction, limited visual fidelity, and difficulties in converting photorealistic models into planning-ready collision geometry. We present a practical framework that constructs high-quality digital twins within minutes from sparse RGB inputs. Our system employs 3D Gaussian Splatting (3DGS) for fast, photorealistic reconstruction as a unified scene representation. We enhance 3DGS with visibility-aware semantic fusion for accurate 3D labelling and introduce an efficient, filter-based geometry conversion method to produce collision-ready models seamlessly integrated with a Unity-ROS2-MoveIt physics engine. In experiments with a Franka Emika Panda robot performing pick-and-place tasks, we demonstrate that this enhanced geometric accuracy effectively supports robust manipulation in real-world trials. These results demonstrate that 3DGS-based digital twins, enriched with semantic and geometric consistency, offer a fast, reliable, and scalable path from perception to manipulation in unstructured environments.
Gait-Conditioned Reinforcement Learning with Multi-Phase Curriculum for Humanoid Locomotion
May 27, 2025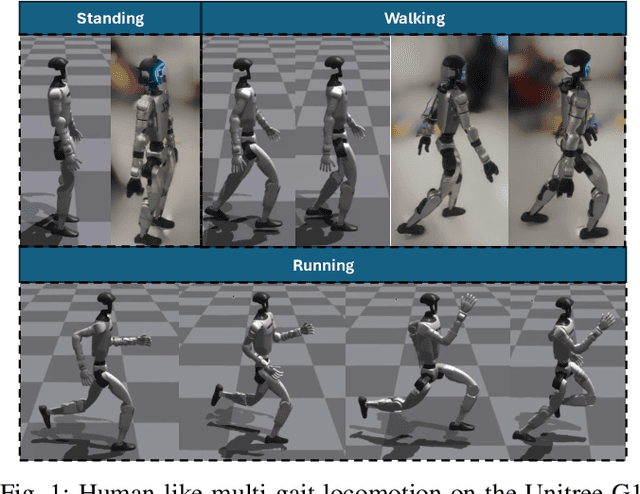
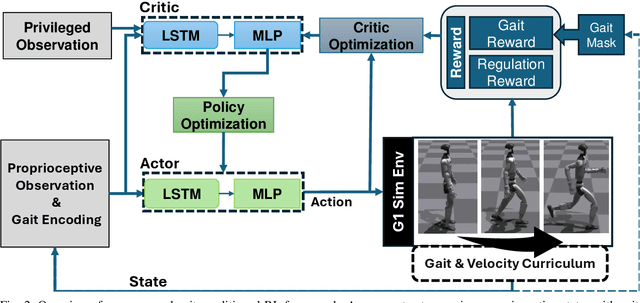
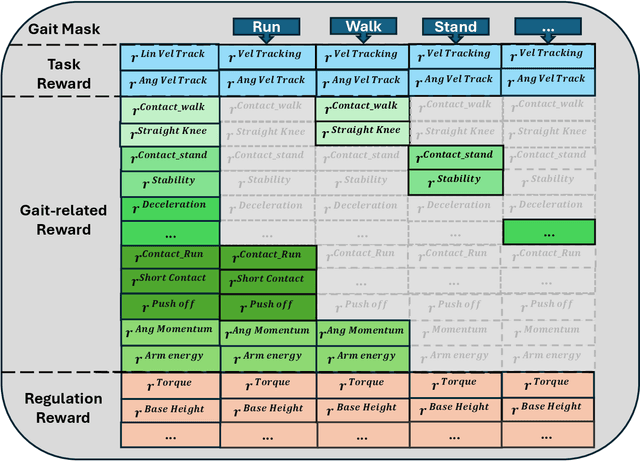
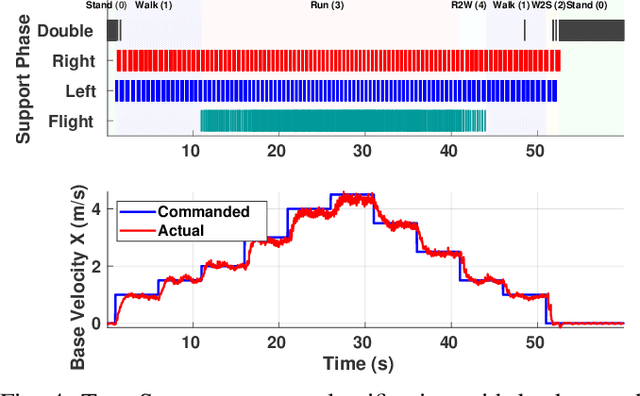
We present a unified gait-conditioned reinforcement learning framework that enables humanoid robots to perform standing, walking, running, and smooth transitions within a single recurrent policy. A compact reward routing mechanism dynamically activates gait-specific objectives based on a one-hot gait ID, mitigating reward interference and supporting stable multi-gait learning. Human-inspired reward terms promote biomechanically natural motions, such as straight-knee stance and coordinated arm-leg swing, without requiring motion capture data. A structured curriculum progressively introduces gait complexity and expands command space over multiple phases. In simulation, the policy successfully achieves robust standing, walking, running, and gait transitions. On the real Unitree G1 humanoid, we validate standing, walking, and walk-to-stand transitions, demonstrating stable and coordinated locomotion. This work provides a scalable, reference-free solution toward versatile and naturalistic humanoid control across diverse modes and environments.
Mastering Agile Jumping Skills from Simple Practices with Iterative Learning Control
Aug 05, 2024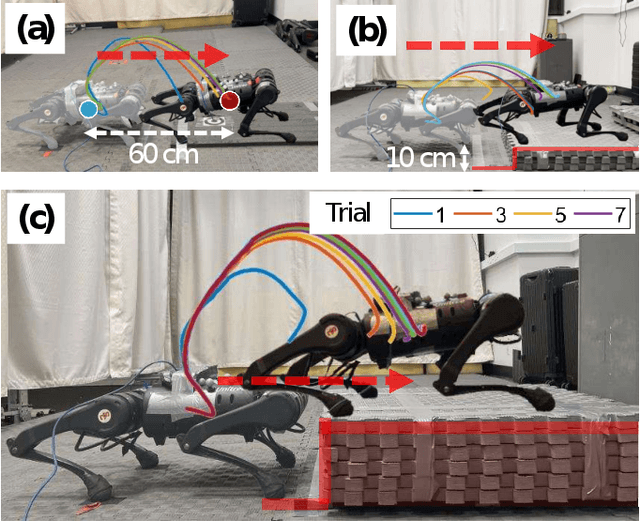
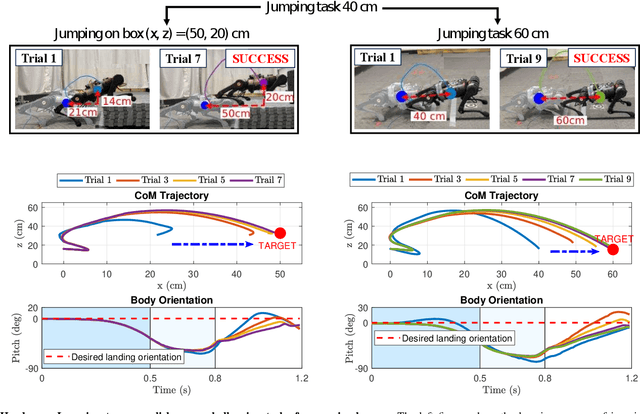
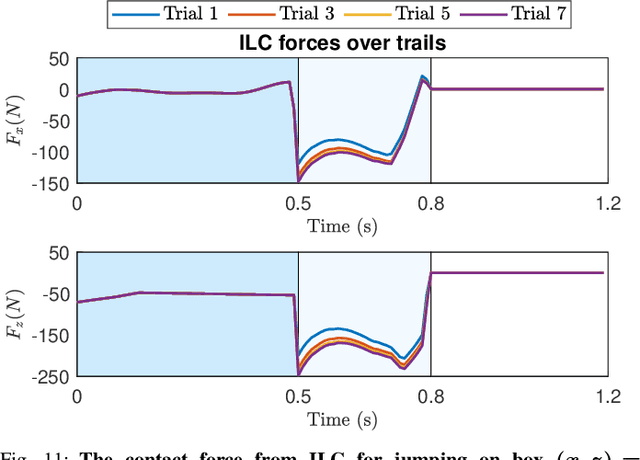
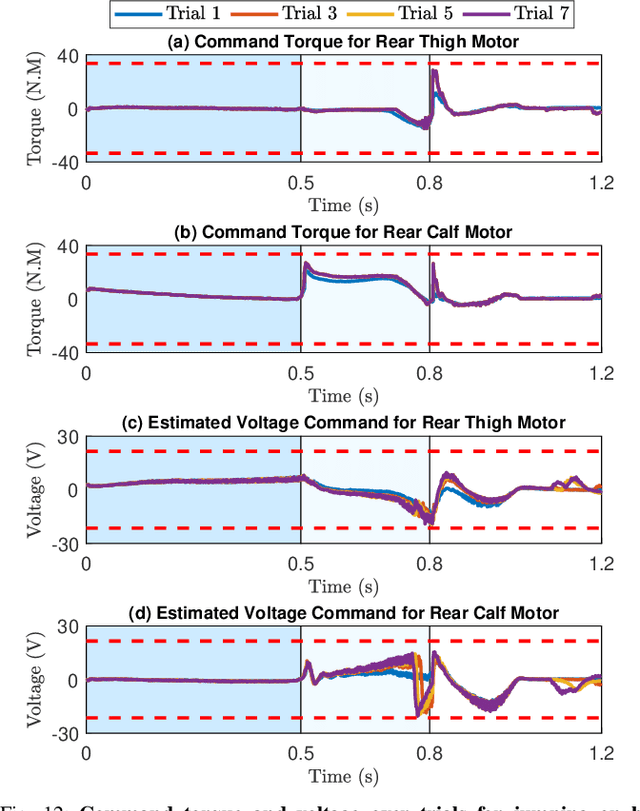
Achieving precise target jumping with legged robots poses a significant challenge due to the long flight phase and the uncertainties inherent in contact dynamics and hardware. Forcefully attempting these agile motions on hardware could result in severe failures and potential damage. Motivated by these challenging problems, we propose an Iterative Learning Control (ILC) approach that aims to learn and refine jumping skills from easy to difficult, instead of directly learning these challenging tasks. We verify that learning from simplicity can enhance safety and target jumping accuracy over trials. Compared to other ILC approaches for legged locomotion, our method can tackle the problem of a long flight phase where control input is not available. In addition, our approach allows the robot to apply what it learns from a simple jumping task to accomplish more challenging tasks within a few trials directly in hardware, instead of learning from scratch. We validate the method via extensive experiments in the A1 model and hardware for various jumping tasks. Starting from a small jump (e.g., a forward leap of 40cm), our learning approach empowers the robot to accomplish a variety of challenging targets, including jumping onto a 20cm high box, jumping to a greater distance of up to 60cm, as well as performing jumps while carrying an unknown payload of 2kg. Our framework can allow the robot to reach the desired position and orientation targets with approximate errors of 1cm and 1 degree within a few trials.
Learning Bipedal Walking on a Quadruped Robot via Adversarial Motion Priors
Jul 02, 2024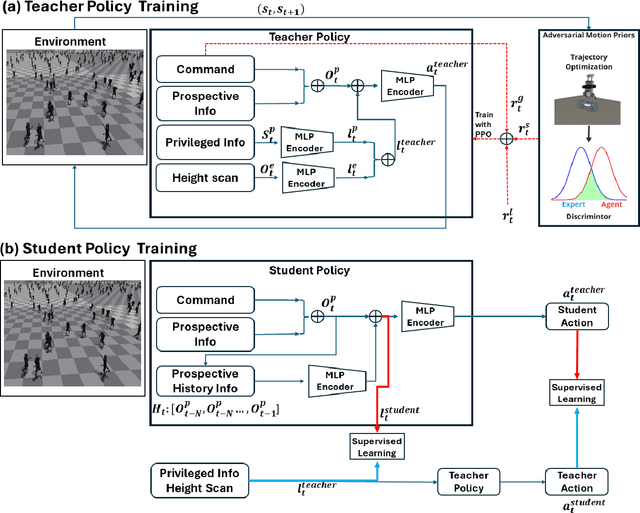
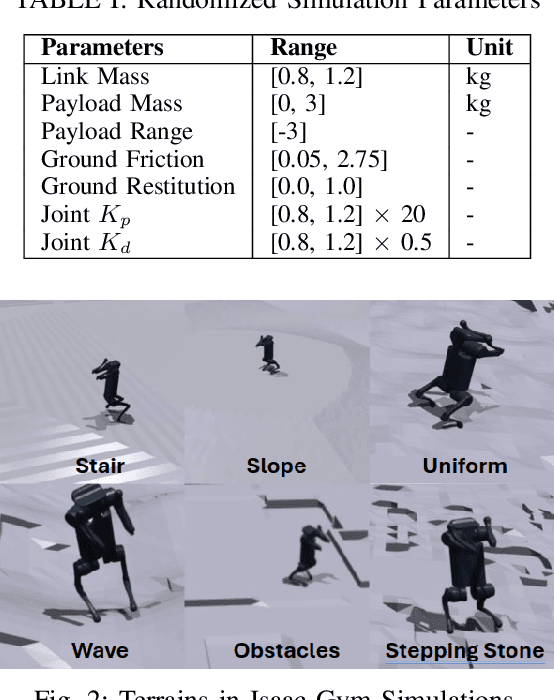
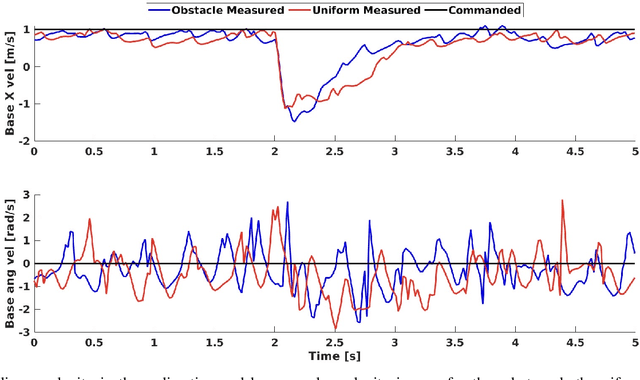
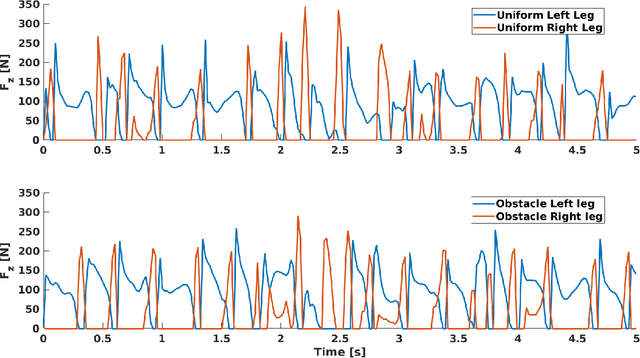
Previous studies have successfully demonstrated agile and robust locomotion in challenging terrains for quadrupedal robots. However, the bipedal locomotion mode for quadruped robots remains unverified. This paper explores the adaptation of a learning framework originally designed for quadrupedal robots to operate blind locomotion in biped mode. We leverage a framework that incorporates Adversarial Motion Priors with a teacher-student policy to enable imitation of a reference trajectory and navigation on tough terrain. Our work involves transferring and evaluating a similar learning framework on a quadruped robot in biped mode, aiming to achieve stable walking on both flat and complicated terrains. Our simulation results demonstrate that the trained policy enables the quadruped robot to navigate both flat and challenging terrains, including stairs and uneven surfaces.
Deep Reinforcement Learning for Bipedal Locomotion: A Brief Survey
Apr 25, 2024



Bipedal robots are garnering increasing global attention due to their potential applications and advancements in artificial intelligence, particularly in Deep Reinforcement Learning (DRL). While DRL has driven significant progress in bipedal locomotion, developing a comprehensive and unified framework capable of adeptly performing a wide range of tasks remains a challenge. This survey systematically categorizes, compares, and summarizes existing DRL frameworks for bipedal locomotion, organizing them into end-to-end and hierarchical control schemes. End-to-end frameworks are assessed based on their learning approaches, whereas hierarchical frameworks are dissected into layers that utilize either learning-based methods or traditional model-based approaches. This survey provides a detailed analysis of the composition, capabilities, strengths, and limitations of each framework type. Furthermore, we identify critical research gaps and propose future directions aimed at achieving a more integrated and efficient framework for bipedal locomotion, with potential broad applications in everyday life.
Continuous Jumping for Legged Robots on Stepping Stones via Trajectory Optimization and Model Predictive Control
Apr 03, 2022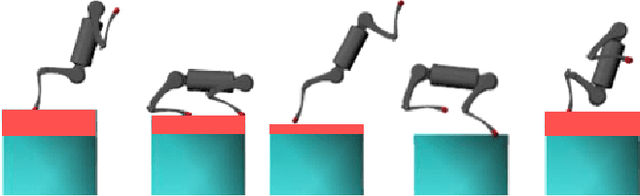

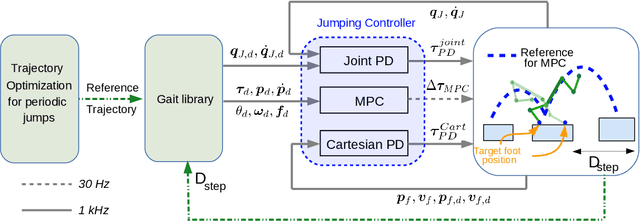

Performing highly agile dynamic motions, such as jumping or running, over uneven stepping stones has remained a challenging problem in legged robot locomotion. This paper presents a framework that combines trajectory optimization and model predictive control to perform consecutive jumping on stepping stones. In our approach, we firstly utilize trajectory optimization for full-nonlinear dynamics to formulate periodic jumps for various jumping distances. A jumping controller based on model predictive control is then designed for dynamic jumping transitions, enabling the robot to achieve continuous jumps on stepping stones. The proposed framework is also validated to be robust to platforms with unknown height perturbations and model uncertainty (e.g. unknown load). Moreover, experiments are also conducted to show the robustness of our jumping controller on an unknown uneven platform.