 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Grasp Ability Enhancement through Deep Shape Generation
Paper and Code
Jun 19, 2022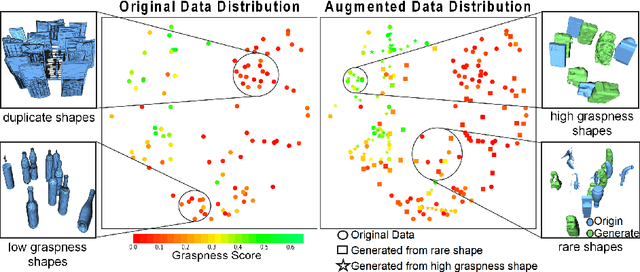
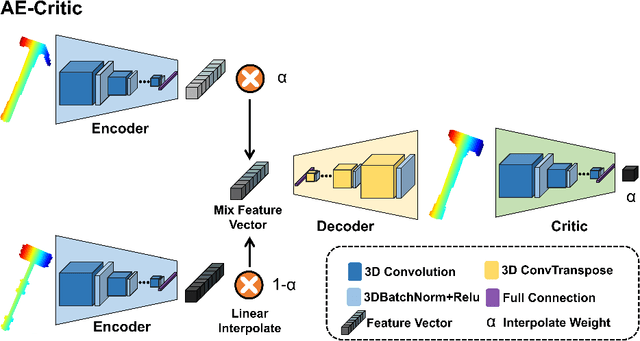
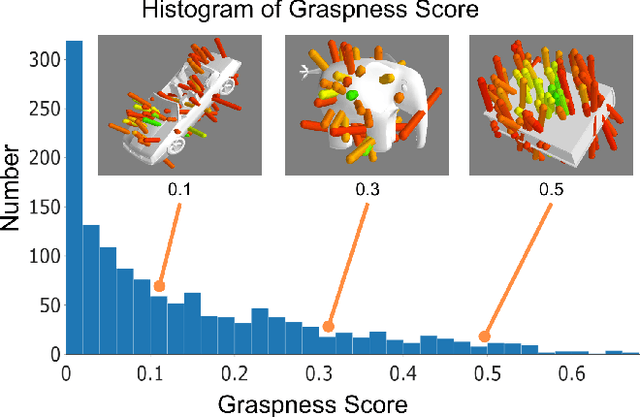
Data-driven especially deep learning-based approaches have become a dominant paradigm for robotic grasp planning during the past decade. However, the performance of these methods is greatly influenced by the quality of the training dataset available. In this paper, we propose a framework to generate object shapes to augment the grasping dataset and thus can improve the grasp ability of a pre-designed deep neural network. First, the object shapes are embedded into a low dimensional feature space using an encoder-decoder structure network. Then, the rarity and graspness scores are computed for each object shape using outlier detection and grasp quality criteria. Finally, new objects are generated in feature space leveraging the original high rarity and graspness score objects' feature. Experimental results show that the grasp ability of a deep-learning-based grasp planning network can be effectively improved with the generated object shapes.