 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAerialClaw: An Open-Source Framework for LLM-Driven Autonomous Aerial Agents
Jun 10, 2026Unmanned aerial vehicles (UAVs) are increasingly used in inspection, search and rescue, environmental monitoring, and emergency response. However, most UAV applications still rely on pre-defined command sequences or task-specific pipelines, where developers manually connect perception, planning, flight control, simulation, logging, and safety modules. This limits the flexibility, reproducibility, and extensibility of autonomous aerial systems. This paper presents AerialClaw, an open-source software framework that enables UAVs to operate as decision-making aerial agents rather than merely command-following platforms. Given a natural-language mission, AerialClaw allows an LLM-based agent to understand the task, maintain context, invoke executable aerial skills, observe perception and runtime feedback, and iteratively update its decisions in a closed loop. The framework adopts a modular brain-skill-runtime architecture, combining hard skills for atomic UAV operations, Markdown-based soft skills for reusable task strategies, document-driven agent state and capability boundaries, memory-driven reflection, safety-oriented runtime validation, and platform-agnostic execution adapters. AerialClaw supports lightweight mock execution, PX4 SITL with Gazebo, and AirSim-based simulation, together with a web console, pluggable model backends, example missions, simulation assets, and staged deployment scripts. By combining standardized aerial skills, document-driven agent state, memory, and closed-loop LLM decision-making, AerialClaw provides a reproducible and extensible open-source framework for building UAV systems that can interpret missions, make decisions, execute skills, and adapt their behavior from feedback.
Differentiable Robot Neural Distance Function for Adaptive Grasp Synthesis on a Unified Robotic Arm-Hand System
Sep 28, 2023Grasping is a fundamental skill for robots to interact with their environment. While grasp execution requires coordinated movement of the hand and arm to achieve a collision-free and secure grip, many grasp synthesis studies address arm and hand motion planning independently, leading to potentially unreachable grasps in practical settings. The challenge of determining integrated arm-hand configurations arises from its computational complexity and high-dimensional nature. We address this challenge by presenting a novel differentiable robot neural distance function. Our approach excels in capturing intricate geometry across various joint configurations while preserving differentiability. This innovative representation proves instrumental in efficiently addressing downstream tasks with stringent contact constraints. Leveraging this, we introduce an adaptive grasp synthesis framework that exploits the full potential of the unified arm-hand system for diverse grasping tasks. Our neural joint space distance function achieves an 84.7% error reduction compared to baseline methods. We validated our approaches on a unified robotic arm-hand system that consists of a 7-DoF robot arm and a 16-DoF multi-fingered robotic hand. Results demonstrate that our approach empowers this high-DoF system to generate and execute various arm-hand grasp configurations that adapt to the size of the target objects while ensuring whole-body movements to be collision-free.
Real-Time Motion Planning for In-Hand Manipulation with a Multi-Fingered Hand
Sep 13, 2023Dexterous manipulation of objects once held in hand remains a challenge. Such skills are, however, necessary for robotics to move beyond gripper-based manipulation and use all the dexterity offered by anthropomorphic robotic hands. One major challenge when manipulating an object within the hand is that fingers must move around the object while avoiding collision with other fingers or the object. Such collision-free paths must be computed in real-time, as the smallest deviation from the original plan can easily lead to collisions. We present a real-time approach to computing collision-free paths in a high-dimensional space. To guide the exploration, we learn an explicit representation of the free space, retrievable in real-time. We further combine this representation with closed-loop control via dynamical systems and sampling-based motion planning and show that the combination increases performance compared to alternatives, offering efficient search of feasible paths and real-time obstacle avoidance in a multi-fingered robotic hand.
Learning Dynamical System for Grasping Motion
Aug 15, 2021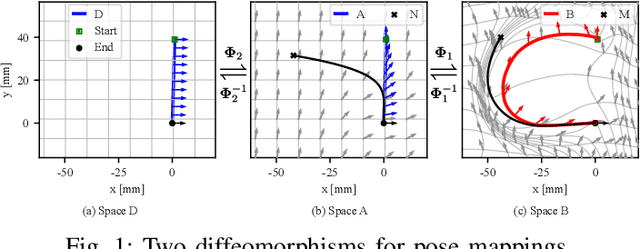
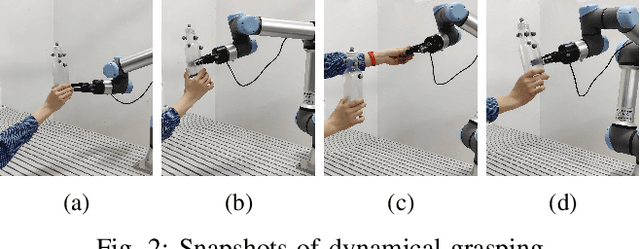
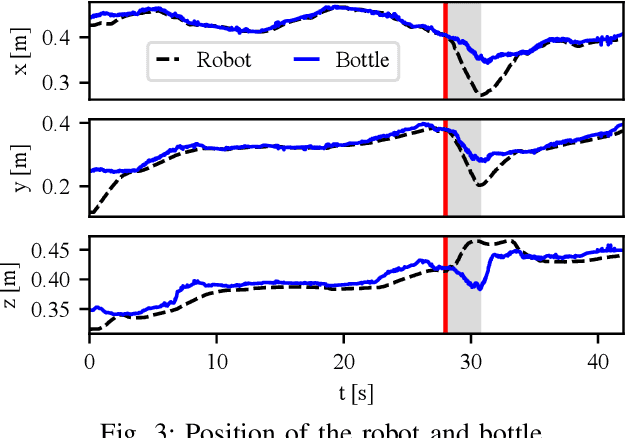
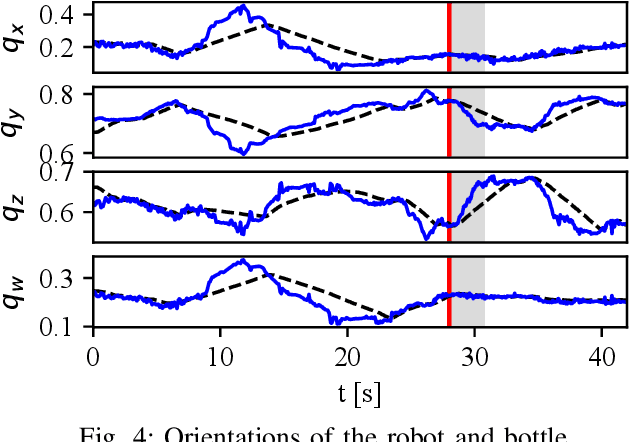
Dynamical System has been widely used for encoding trajectories from human demonstration, which has the inherent adaptability to dynamically changing environments and robustness to perturbations. In this paper we propose a framework to learn a dynamical system that couples position and orientation based on a diffeomorphism. Different from other methods, it can realise the synchronization between positon and orientation during the whole trajectory. Online grasping experiments are carried out to prove its effectiveness and online adaptability.
Motion Mappings for Continuous Bilateral Teleoperation
Dec 11, 2020
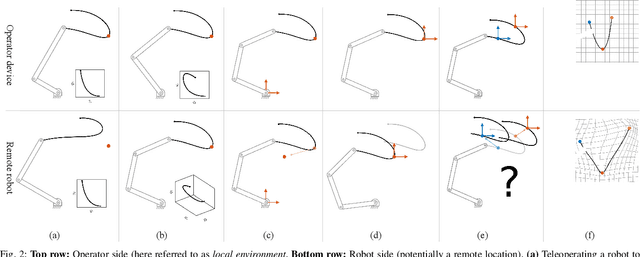


Mapping operator motions to a robot is a key problem in teleoperation. Due to differences between workspaces, such as object locations, it is particularly challenging to derive smooth motion mappings that fulfill different goals (e.g. picking objects with different poses on the two sides or passing through key points). Indeed, most state-of-the-art methods rely on mode switches, leading to a discontinuous, low-transparency experience. In this paper, we propose a unified formulation for position, orientation and velocity mappings based on the poses of objects of interest in the operator and robot workspaces. We apply it in the context of bilateral teleoperation. Two possible implementations to achieve the proposed mappings are studied: an iterative approach based on locally-weighted translations and rotations, and a neural network approach. Evaluations are conducted both in simulation and using two torque-controlled Franka Emika Panda robots. Our results show that, despite longer training times, the neural network approach provides faster mapping evaluations and lower interaction forces for the operator, which are crucial for continuous, real-time teleoperation.