 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLMs Gaming Verifiers: RLVR can Lead to Reward Hacking
Apr 16, 2026As reinforcement Learning with Verifiable Rewards (RLVR) has become the dominant paradigm for scaling reasoning capabilities in LLMs, a new failure mode emerges: LLMs gaming verifiers. We study this phenomenon on inductive reasoning tasks, where models must induce and output logical rules. We find that RLVR-trained models systematically abandon rule induction. Instead of learning generalizable patterns (e.g., ``trains carrying red cars go east''), they enumerate instance-level labels, producing outputs that pass verifiers without capturing the relational patterns required by the task. We show that this behavior is not a failure of understanding but a form of reward hacking: imperfect verifiers that check only extensional correctness admit false positives. To detect such shortcuts, we introduce Isomorphic Perturbation Testing (IPT), which evaluates a single model output under both extensional and isomorphic verification, where the latter enforces invariance under logically isomorphic tasks. While genuine rule induction remains invariant, shortcut strategies fail. We find that shortcut behavior is specific to RLVR-trained reasoning models (e.g., GPT-5, Olmo3) and absent in non-RLVR models (e.g., GPT-4o, GPT-4.5, Ministral). Moreover, shortcut prevalence increases with task complexity and inference-time compute. In controlled training experiments, extensional verification directly induces shortcut strategies, while isomorphic verification eliminates them. These results show that RLVR can incentivize reward hacking not only through overt manipulation but also by exploiting what the verifier fails to enforce.
Seeing Through Circuits: Faithful Mechanistic Interpretability for Vision Transformers
Apr 15, 2026Transparency of neural networks' internal reasoning is at the heart of interpretability research, adding to trust, safety, and understanding of these models. The field of mechanistic interpretability has recently focused on studying task-specific computational graphs, defined by connections (edges) between model components. Such edge-based circuits have been defined in the context of large language models, yet vision-based approaches so far only consider neuron-based circuits. These tell which information is encoded, but not how it is routed through the complex wiring of a neural network. In this work, we investigate whether useful mechanistic circuits can be identified through computational graphs in vision transformers. We propose an effective method for Automatic Visual Circuit Discovery (Vi-CD) that recovers class-specific circuits for classification, identifies circuits underlying typographic attacks in CLIP, and discovers circuits that lend themselves for steering to correct harmful model behavior. Overall, we find that insightful and actionable edge-based circuits can be recovered from vision transformers, adding transparency to the internal computations of these models.
Neural Concept Verifier: Scaling Prover-Verifier Games via Concept Encodings
Jul 10, 2025While Prover-Verifier Games (PVGs) offer a promising path toward verifiability in nonlinear classification models, they have not yet been applied to complex inputs such as high-dimensional images. Conversely, Concept Bottleneck Models (CBMs) effectively translate such data into interpretable concepts but are limited by their reliance on low-capacity linear predictors. In this work, we introduce the Neural Concept Verifier (NCV), a unified framework combining PVGs with concept encodings for interpretable, nonlinear classification in high-dimensional settings. NCV achieves this by utilizing recent minimally supervised concept discovery models to extract structured concept encodings from raw inputs. A prover then selects a subset of these encodings, which a verifier -- implemented as a nonlinear predictor -- uses exclusively for decision-making. Our evaluations show that NCV outperforms CBM and pixel-based PVG classifier baselines on high-dimensional, logically complex datasets and also helps mitigate shortcut behavior. Overall, we demonstrate NCV as a promising step toward performative, verifiable AI.
Object Centric Concept Bottlenecks
May 30, 2025Developing high-performing, yet interpretable models remains a critical challenge in modern AI. Concept-based models (CBMs) attempt to address this by extracting human-understandable concepts from a global encoding (e.g., image encoding) and then applying a linear classifier on the resulting concept activations, enabling transparent decision-making. However, their reliance on holistic image encodings limits their expressiveness in object-centric real-world settings and thus hinders their ability to solve complex vision tasks beyond single-label classification. To tackle these challenges, we introduce Object-Centric Concept Bottlenecks (OCB), a framework that combines the strengths of CBMs and pre-trained object-centric foundation models, boosting performance and interpretability. We evaluate OCB on complex image datasets and conduct a comprehensive ablation study to analyze key components of the framework, such as strategies for aggregating object-concept encodings. The results show that OCB outperforms traditional CBMs and allows one to make interpretable decisions for complex visual tasks.
Neural Concept Binder
Jun 14, 2024



The challenge in object-based visual reasoning lies in generating descriptive yet distinct concept representations. Moreover, doing this in an unsupervised fashion requires human users to understand a model's learned concepts and potentially revise false concepts. In addressing this challenge, we introduce the Neural Concept Binder, a new framework for deriving discrete concept representations resulting in what we term "concept-slot encodings". These encodings leverage both "soft binding" via object-centric block-slot encodings and "hard binding" via retrieval-based inference. The Neural Concept Binder facilitates straightforward concept inspection and direct integration of external knowledge, such as human input or insights from other AI models like GPT-4. Additionally, we demonstrate that incorporating the hard binding mechanism does not compromise performance; instead, it enables seamless integration into both neural and symbolic modules for intricate reasoning tasks, as evidenced by evaluations on our newly introduced CLEVR-Sudoku dataset.
Pix2Code: Learning to Compose Neural Visual Concepts as Programs
Feb 13, 2024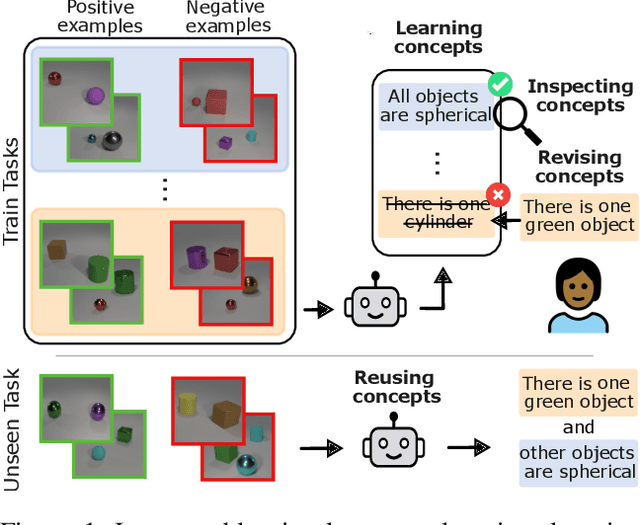
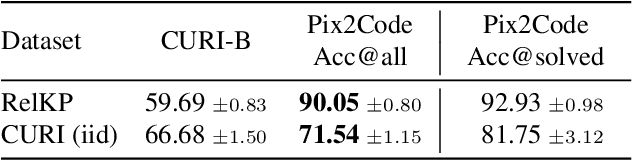
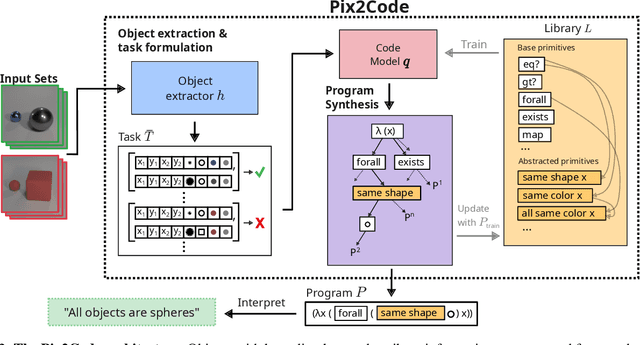
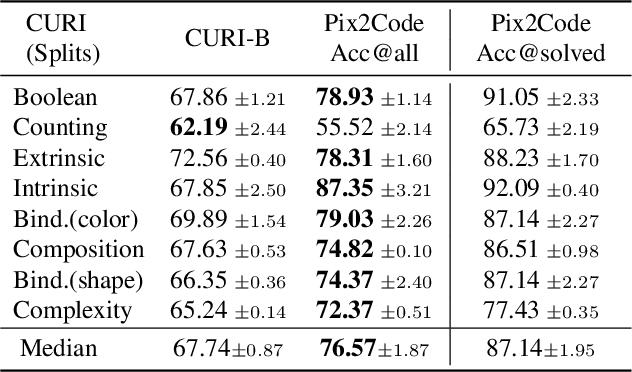
The challenge in learning abstract concepts from images in an unsupervised fashion lies in the required integration of visual perception and generalizable relational reasoning. Moreover, the unsupervised nature of this task makes it necessary for human users to be able to understand a model's learnt concepts and potentially revise false behaviours. To tackle both the generalizability and interpretability constraints of visual concept learning, we propose Pix2Code, a framework that extends program synthesis to visual relational reasoning by utilizing the abilities of both explicit, compositional symbolic and implicit neural representations. This is achieved by retrieving object representations from images and synthesizing relational concepts as lambda-calculus programs. We evaluate the diverse properties of Pix2Code on the challenging reasoning domains, Kandinsky Patterns and CURI, thereby testing its ability to identify compositional visual concepts that generalize to novel data and concept configurations. Particularly, in stark contrast to neural approaches, we show that Pix2Code's representations remain human interpretable and can be easily revised for improved performance.
Where is the Truth? The Risk of Getting Confounded in a Continual World
Feb 09, 2024A dataset is confounded if it is most easily solved via a spurious correlation which fails to generalize to new data. We will show that, in a continual learning setting where confounders may vary in time across tasks, the resulting challenge far exceeds the standard forgetting problem normally considered. In particular, we derive mathematically the effect of such confounders on the space of valid joint solutions to sets of confounded tasks. Interestingly, our theory predicts that for many such continual datasets, spurious correlations are easily ignored when the tasks are trained on jointly, but it is far harder to avoid confounding when they are considered sequentially. We construct such a dataset and demonstrate empirically that standard continual learning methods fail to ignore confounders, while training jointly on all tasks is successful. Our continually confounded dataset, ConCon, is based on CLEVR images and demonstrates the need for continual learning methods with more robust behavior with respect to confounding.
Interpretable Concept Bottlenecks to Align Reinforcement Learning Agents
Feb 01, 2024Goal misalignment, reward sparsity and difficult credit assignment are only a few of the many issues that make it difficult for deep reinforcement learning (RL) agents to learn optimal policies. Unfortunately, the black-box nature of deep neural networks impedes the inclusion of domain experts for inspecting the model and revising suboptimal policies. To this end, we introduce *Successive Concept Bottleneck Agents* (SCoBots), that integrate consecutive concept bottleneck (CB) layers. In contrast to current CB models, SCoBots do not just represent concepts as properties of individual objects, but also as relations between objects which is crucial for many RL tasks. Our experimental results provide evidence of SCoBots' competitive performances, but also of their potential for domain experts to understand and regularize their behavior. Among other things, SCoBots enabled us to identify a previously unknown misalignment problem in the iconic video game, Pong, and resolve it. Overall, SCoBots thus result in more human-aligned RL agents. Our code is available at https://github.com/k4ntz/SCoBots .
Learning by Self-Explaining
Sep 15, 2023Artificial intelligence (AI) research has a long track record of drawing inspirations from findings from biology, in particular human intelligence. In contrast to current AI research that mainly treats explanations as a means for model inspection, a somewhat neglected finding from human psychology is the benefit of self-explaining in an agents' learning process. Motivated by this, we introduce a novel learning paradigm, termed Learning by Self-Explaining (LSX). The underlying idea is that a learning module (learner) performs a base task, e.g. image classification, and provides explanations to its decisions. An internal critic module next evaluates the quality of these explanations given the original task. Finally, the learner is refined with the critic's feedback and the loop is repeated as required. The intuition behind this is that an explanation is considered "good" if the critic can perform the same task given the respective explanation. Despite many implementation possibilities the structure of any LSX instantiation can be taxonomized based on four learning modules which we identify as: Fit, Explain, Reflect and Revise. In our work, we provide distinct instantiations of LSX for two different learner models, each illustrating different choices for the various LSX components. We broadly evaluate these on several datasets and show that Learning by Self-Explaining not only boosts the generalization abilities of AI models, particularly in small-data regimes, but also aids in mitigating the influence of confounding factors, as well as leading to more task specific and faithful model explanations. Overall, our results provide experimental evidence of the potential of self-explaining within the learning phase of an AI model.
Learning to Intervene on Concept Bottlenecks
Aug 25, 2023



While traditional deep learning models often lack interpretability, concept bottleneck models (CBMs) provide inherent explanations via their concept representations. Specifically, they allow users to perform interventional interactions on these concepts by updating the concept values and thus correcting the predictive output of the model. Traditionally, however, these interventions are applied to the model only once and discarded afterward. To rectify this, we present concept bottleneck memory models (CB2M), an extension to CBMs. Specifically, a CB2M learns to generalize interventions to appropriate novel situations via a two-fold memory with which it can learn to detect mistakes and to reapply previous interventions. In this way, a CB2M learns to automatically improve model performance from a few initially obtained interventions. If no prior human interventions are available, a CB2M can detect potential mistakes of the CBM bottleneck and request targeted interventions. In our experimental evaluations on challenging scenarios like handling distribution shifts and confounded training data, we illustrate that CB2M are able to successfully generalize interventions to unseen data and can indeed identify wrongly inferred concepts. Overall, our results show that CB2M is a great tool for users to provide interactive feedback on CBMs, e.g., by guiding a user's interaction and requiring fewer interventions.