 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLIME: Making LLM Data More Efficient with Linguistic Metadata Embeddings
Dec 08, 2025Pre-training decoder-only language models relies on vast amounts of high-quality data, yet the availability of such data is increasingly reaching its limits. While metadata is commonly used to create and curate these datasets, its potential as a direct training signal remains under-explored. We challenge this status quo and propose LIME (Linguistic Metadata Embeddings), a method that enriches token embeddings with metadata capturing syntax, semantics, and contextual properties. LIME substantially improves pre-training efficiency. Specifically, it adapts up to 56% faster to the training data distribution, while introducing only 0.01% additional parameters at negligible compute overhead. Beyond efficiency, LIME improves tokenization, leading to remarkably stronger language modeling capabilities and generative task performance. These benefits persist across model scales (500M to 2B). In addition, we develop a variant with shifted metadata, LIME+1, that can guide token generation. Given prior metadata for the next token, LIME+1 improves reasoning performance by up to 38% and arithmetic accuracy by up to 35%.
Interpretable Concept Bottlenecks to Align Reinforcement Learning Agents
Feb 01, 2024Goal misalignment, reward sparsity and difficult credit assignment are only a few of the many issues that make it difficult for deep reinforcement learning (RL) agents to learn optimal policies. Unfortunately, the black-box nature of deep neural networks impedes the inclusion of domain experts for inspecting the model and revising suboptimal policies. To this end, we introduce *Successive Concept Bottleneck Agents* (SCoBots), that integrate consecutive concept bottleneck (CB) layers. In contrast to current CB models, SCoBots do not just represent concepts as properties of individual objects, but also as relations between objects which is crucial for many RL tasks. Our experimental results provide evidence of SCoBots' competitive performances, but also of their potential for domain experts to understand and regularize their behavior. Among other things, SCoBots enabled us to identify a previously unknown misalignment problem in the iconic video game, Pong, and resolve it. Overall, SCoBots thus result in more human-aligned RL agents. Our code is available at https://github.com/k4ntz/SCoBots .
OCAtari: Object-Centric Atari 2600 Reinforcement Learning Environments
Jun 14, 2023
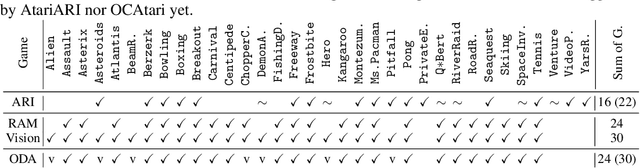


Cognitive science and psychology suggest that object-centric representations of complex scenes are a promising step towards enabling efficient abstract reasoning from low-level perceptual features. Yet, most deep reinforcement learning approaches rely on only pixel-based representations that do not capture the compositional properties of natural scenes. For this, we need environments and datasets that allow us to work and evaluate object-centric approaches. We present OCAtari, a set of environment that provides object-centric state representations of Atari games, the most-used evaluation framework for deep RL approaches. OCAtari also allows for RAM state manipulations of the games to change and create specific or even novel situations. The code base for this work is available at github.com/k4ntz/OC_Atari.