 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Stroke Motion Following the Shape of the Human Back: Motion Generation and Psychological Effects
May 10, 2024In this study, to perform the robotic stroke motions following the shape of the human back similar to the stroke motions by humans, in contrast to the conventional robotic stroke motion with a linear trajectory, we propose a trajectory generation method for a robotic stroke motion following the shape of the human back. We confirmed that the accuracy of the method's trajectory was close to that of the actual stroking motion by a human. Furthermore, we conducted a subjective experiment to evaluate the psychological effects of the proposed stroke motion in contrast to those of the conventional stroke motion with a linear trajectory. The experimental results showed that the actual stroke motion following the shape of the human back tended to evoke more pleasant and active feelings than the conventional stroke motion.
Soft-Jig: A Flexible Sensing Jig for Simultaneously Fixing and Estimating Orientation of Assembly Parts
Sep 16, 2021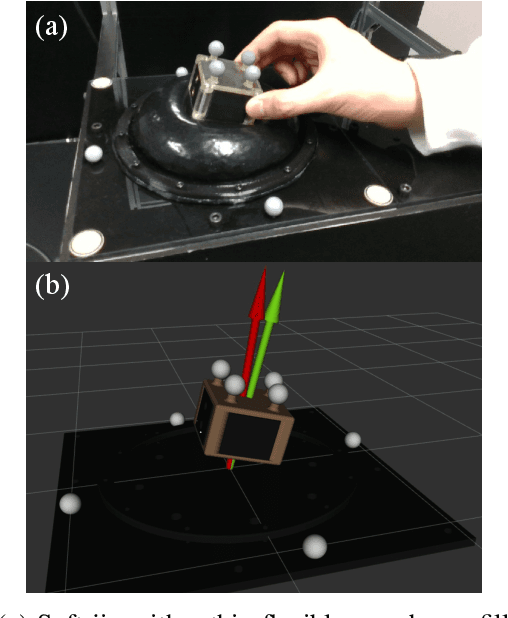
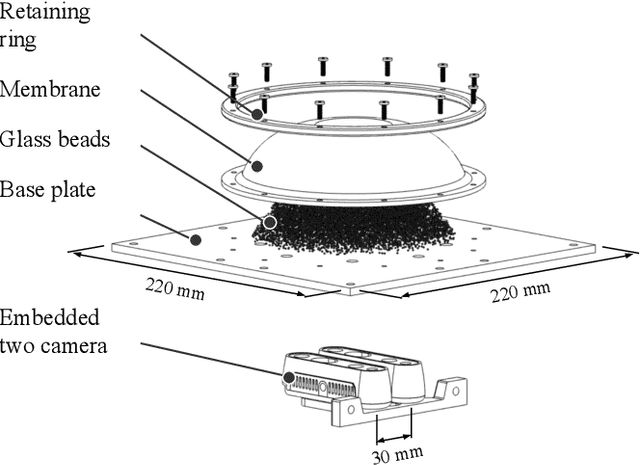
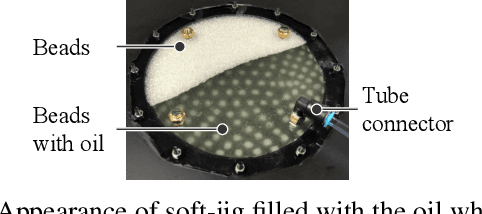

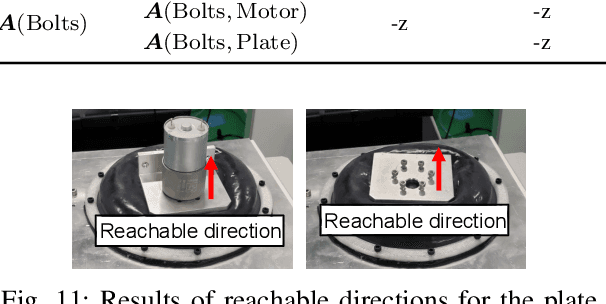
For assembly tasks, it is essential to firmly fix target parts and to accurately estimate their poses. Several rigid jigs for individual parts are frequently used in assembly factories to achieve precise and time-efficient product assembly. However, providing customized jigs is time-consuming. In this study, to address the lack of versatility in the shapes the jigs can be used for, we developed a flexible jig with a soft membrane including transparent beads and oil with a tuned refractive index. The bead-based jamming transition was accomplished by discharging only oil enabling a part to be firmly fixed. Because the two cameras under the jig are able to capture membrane shape changes, we proposed a sensing method to estimate the orientation of the part based on the behaviors of markers created on the jig's inner surface. Through estimation experiments, the proposed system could estimate the orientation of a cylindrical object with a diameter larger than 50 mm and an RMSE of less than 3 degrees.
Robotic Waste Sorter with Agile Manipulation and Quickly Trainable Detector
Apr 02, 2021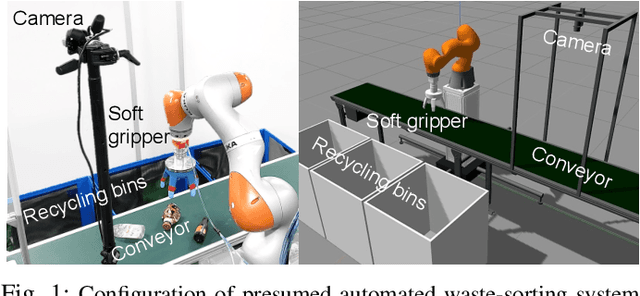
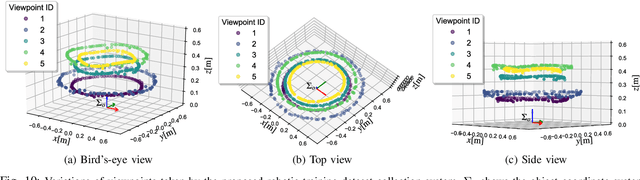
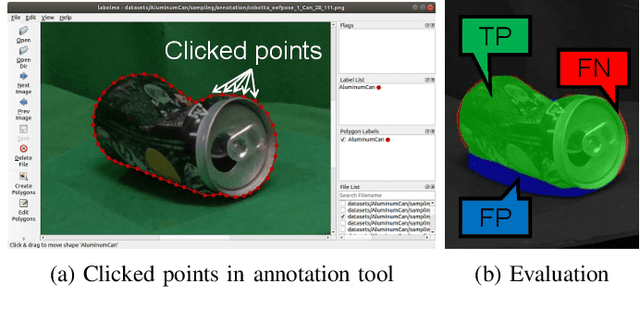
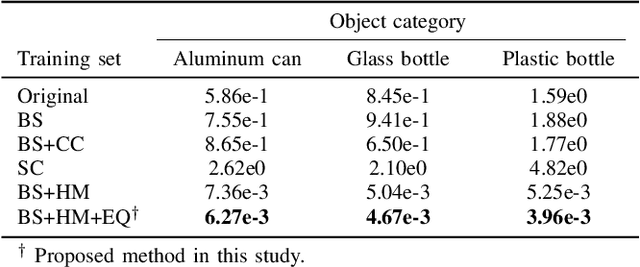
Owing to human labor shortages, the automation of labor-intensive manual waste-sorting is needed. The goal of automating the waste-sorting is to replace the human role of robust detection and agile manipulation of the waste items by robots. To achieve this, we propose three methods. First, we propose a combined manipulation method using graspless push-and-drop and pick-and-release manipulation. Second, we propose a robotic system that can automatically collect object images to quickly train a deep neural network model. Third, we propose the method to mitigate the differences in the appearance of target objects from two scenes: one for the dataset collection and the other for waste sorting in a recycling factory. If differences exist, the performance of a trained waste detector could be decreased. We address differences in illumination and background by applying object scaling, histogram matching with histogram equalization, and background synthesis to the source target-object images. Via experiments in an indoor experimental workplace for waste-sorting, we confirmed the proposed methods enable quickly collecting the training image sets for three classes of waste items, i.e., aluminum can, glass bottle, and plastic bottle and detecting them with higher performance than the methods that do not consider the differences. We also confirmed that the proposed method enables the robot quickly manipulate them.
Toward an Affective Touch Robot: Subjective and Physiological Evaluation of Gentle Stroke Motion Using a Human-Imitation Hand
Dec 09, 2020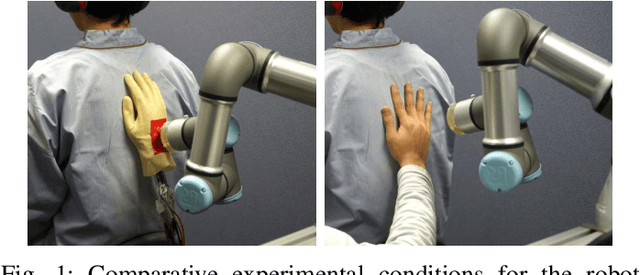
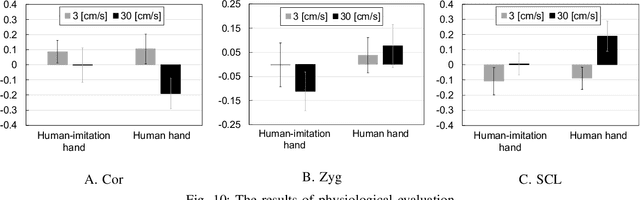
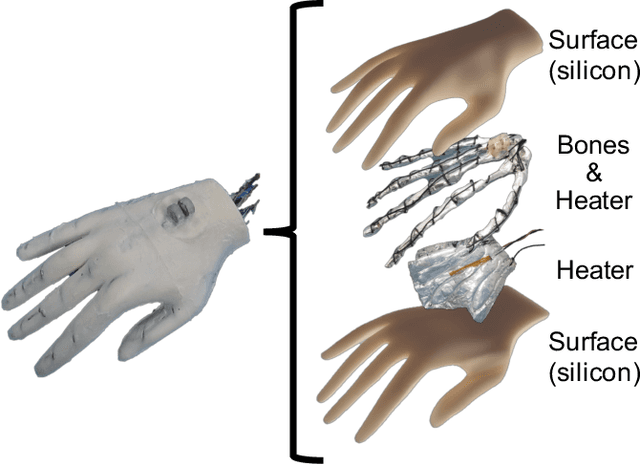
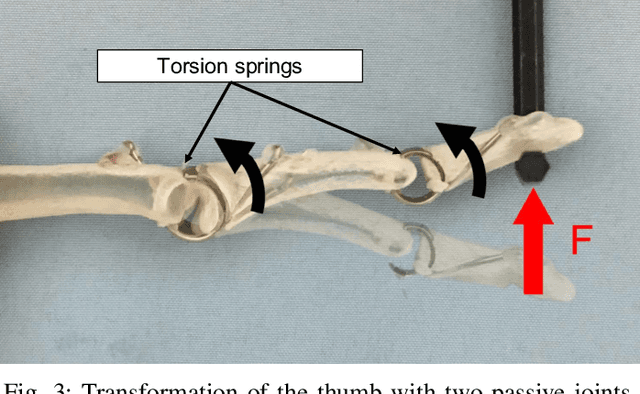
Affective touch offers positive psychological and physiological benefits such as the mitigation of stress and pain. If a robot could realize human-like affective touch, it would open up new application areas, including supporting care work. In this research, we focused on the gentle stroking motion of a robot to evoke the same emotions that human touch would evoke: in other words, an affective touch robot. We propose a robot that is able to gently stroke the back of a human using our designed human-imitation hand. To evaluate the emotional effects of this affective touch, we compared the results of a combination of two agents (the human-imitation hand and the human hand), at two stroke speeds (3 and 30 cm/s). The results of the subjective and physiological evaluations highlighted the following three findings: 1) the subjects evaluated strokes similarly with regard to the stroke speed of the human and human-imitation hand, in both the subjective and physiological evaluations; 2) the subjects felt greater pleasure and arousal at the faster stroke rate (30 cm/s rather than 3 cm/s); and 3) poorer fitting of the human-imitation hand due to the bending of the back had a negative emotional effect on the subjects.
Assembly Sequences Based on Multiple Criteria Against Products with Deformable Parts
Oct 21, 2020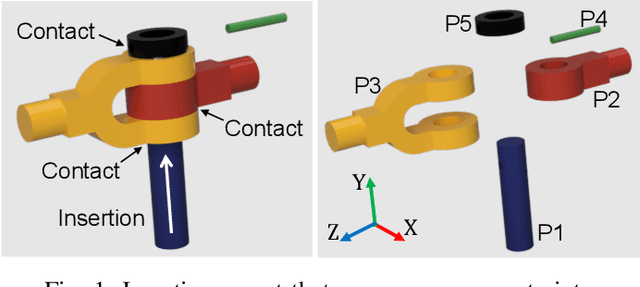

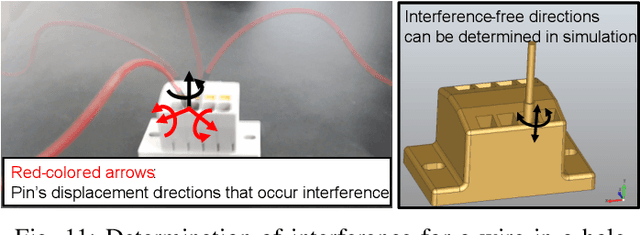
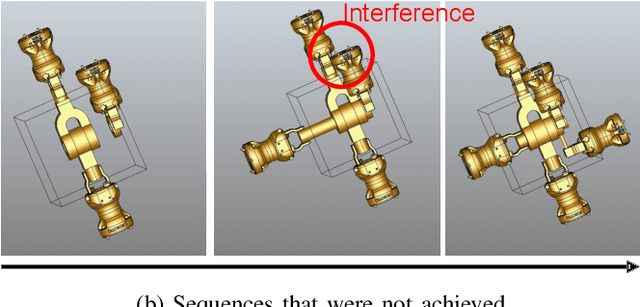
This study investigates assembly sequence generation by considering two tradeoff objectives: (1) insertion conditions and (2) degrees of constraints among assembled parts. A multiobjective genetic algorithm is used to balance these two objectives for planning robotic assembly. Furthermore, the method of extracting part relation matrices including interference-free, insertion, and degree of constraint matrices is extended for application to 3D computer-aided design (CAD) models, including deformable parts. The interference of deformable parts with other parts can be easily investigated by scaling models. A simulation experiment was conducted using the proposed method, and the results show the possibility of obtaining Pareto-optimal solutions of assembly sequences for a 3D CAD model with 33 parts including a deformable part. This approach can potentially be extended to handle various types of deformable parts and to explore graspable sequences during assembly operations.
Soft Jig-Driven Assembly Operations
Oct 21, 2020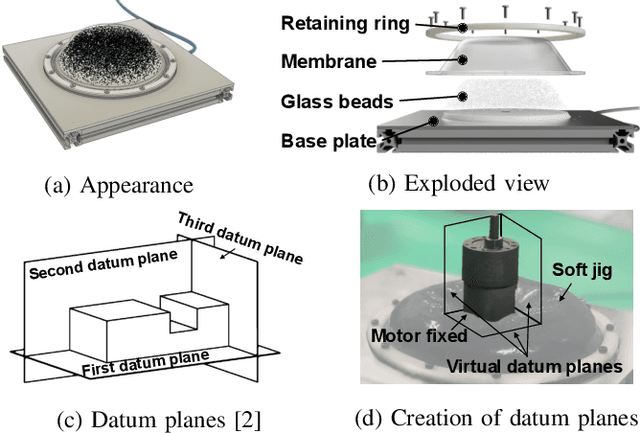
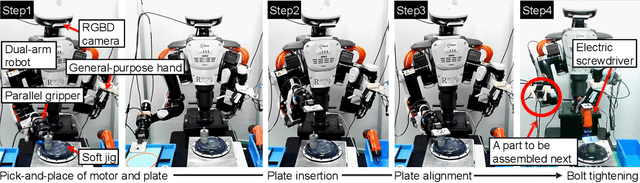

To design a general-purpose assembly robot system that can handle objects of various shapes, we propose a soft jig capable of deforming according to the shape of assembly parts. The soft jig is based on a jamming gripper used for robot manipulation as a general-purpose robotic gripper developed in the field of soft robotics. The soft jig has a flexible membrane made of silicone, which has a high friction, elongation, and contraction rate for keeping parts strictly fixed. The inside of the membrane is filled with glass beads to achieve a jamming transition. The usability of the soft jig was evaluated from the viewpoint of the versatility and fixing performance for various shapes and postures of parts in assembly operations.
Control of Walking Assist Exoskeleton with Time-delay Based on the Prediction of Plantar Force
Jul 17, 2020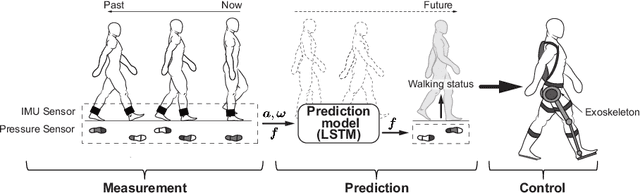

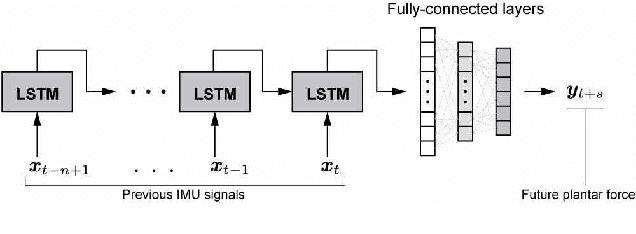
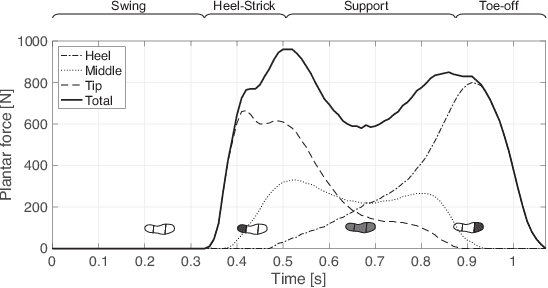
Many kinds of lower-limb exoskeletons were developed for walking assistance. However, when controlling these exoskeletons, time-delay due to the computation time and the communication delays is still a general problem. In this research, we propose a novel method to prevent the time-delay when controlling a walking assist exoskeleton by predicting the future plantar force and walking status. By using Long Short-Term Memory and a fully-connected network, the plantar force can be predicted using only data measured by inertial measurement unit sensors, not only during the walking period but also at the start and end of walking. From the predicted plantar force, the walking status and the desired assistance timing can also be determined. By considering the time-delay and sending the control commands beforehand, the exoskeleton can be moved precisely on the desired assistance timing. In experiments, the prediction accuracy of the plantar force and the assistance timing are confirmed. The performance of the proposed method is also evaluated by using the trained model to control the exoskeleton.
Multi-View Inpainting for RGB-D Sequence
Nov 22, 2018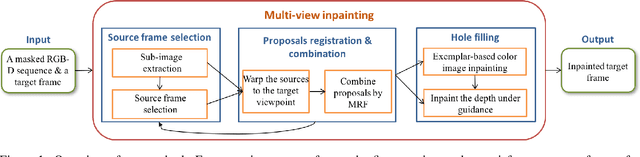
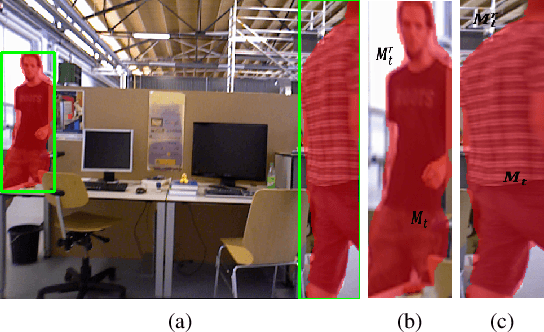
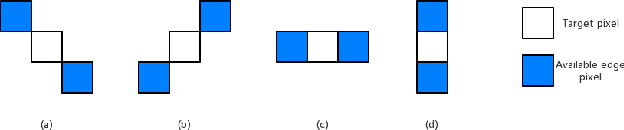
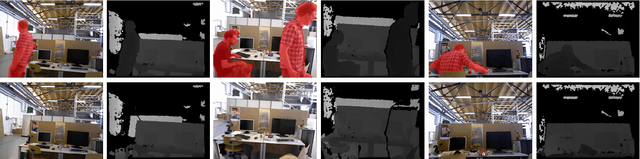
In this work we propose a novel approach to remove undesired objects from RGB-D sequences captured with freely moving cameras, which enables static 3D reconstruction. Our method jointly uses existing information from multiple frames as well as generates new one via inpainting techniques. We use balanced rules to select source frames; local homography based image warping method for alignment and Markov random field (MRF) based approach for combining existing information. For the left holes, we employ exemplar based multi-view inpainting method to deal with the color image and coherently use it as guidance to complete the depth correspondence. Experiments show that our approach is qualified for removing the undesired objects and inpainting the holes.
* 10 pages