 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward an Affective Touch Robot: Subjective and Physiological Evaluation of Gentle Stroke Motion Using a Human-Imitation Hand
Paper and Code
Dec 09, 2020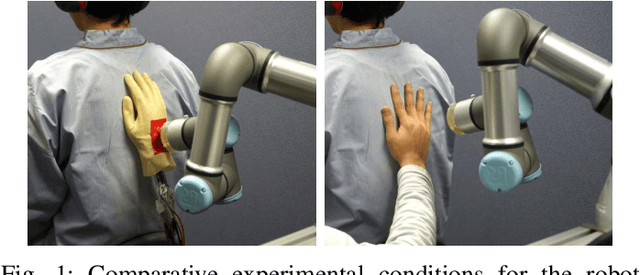
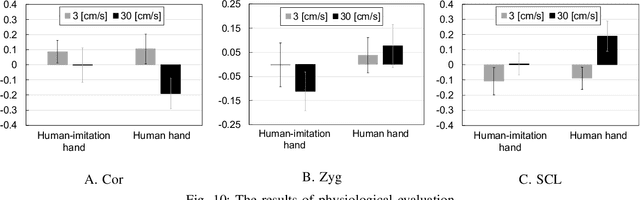
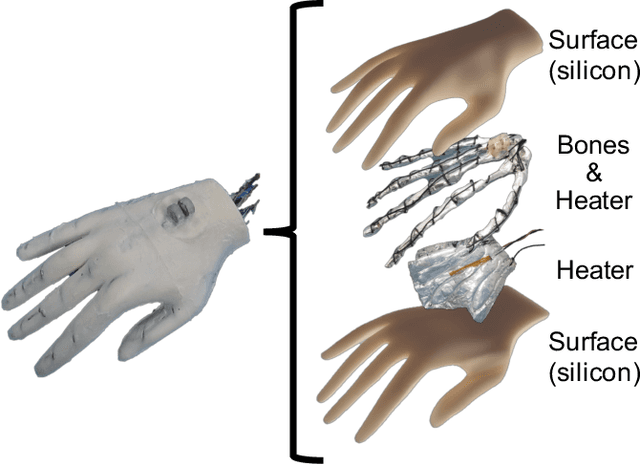
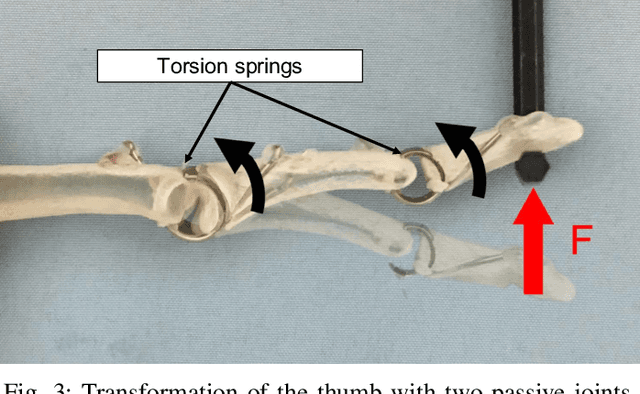
Affective touch offers positive psychological and physiological benefits such as the mitigation of stress and pain. If a robot could realize human-like affective touch, it would open up new application areas, including supporting care work. In this research, we focused on the gentle stroking motion of a robot to evoke the same emotions that human touch would evoke: in other words, an affective touch robot. We propose a robot that is able to gently stroke the back of a human using our designed human-imitation hand. To evaluate the emotional effects of this affective touch, we compared the results of a combination of two agents (the human-imitation hand and the human hand), at two stroke speeds (3 and 30 cm/s). The results of the subjective and physiological evaluations highlighted the following three findings: 1) the subjects evaluated strokes similarly with regard to the stroke speed of the human and human-imitation hand, in both the subjective and physiological evaluations; 2) the subjects felt greater pleasure and arousal at the faster stroke rate (30 cm/s rather than 3 cm/s); and 3) poorer fitting of the human-imitation hand due to the bending of the back had a negative emotional effect on the subjects.