 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComponent Influence-Driven Fastener Reduction for Robotic Disassemblability-Aware Design Simplification
May 20, 2026To accelerate automated remanufacturing, robotic disassembly must be considered during the product design phase. However, designers currently lack quantitative feedback to identify which structural elements hinder robotic operations. To address this, this study proposes an analytical framework that provides actionable redesign guidance focused on fastener reduction, as fasteners are numerous and ubiquitous components found in almost all manufactured products. Using a Computer-Aided Design (CAD) model and its automatically generated Contact-Connection-Constraint (CCC) graph, the framework translates robotic disassembly sequence planning outcomes into component influence scores. These scores reflect how often a component causes structural constraint violations or evaluation objective deteriorations in the robotic disassembly sequence. To visually highlight structural hindrances, the framework projects these scores onto the CAD geometry as 3D heatmaps. The system then analytically simulates the removal of highly influential fasteners. It reports the expected reductions in structural constraints, tool changes, and robot travel distances, while preventing structurally unsafe modifications by evaluating geometric stability metrics. Experiments on seven household appliances demonstrate that the framework successfully targets redundant fasteners. Removing the recommended fasteners simplified the structural dependencies by eliminating between 8 and 132 structural constraints on the graph depending on each product's structural configuration. Furthermore, it improved robotic operational efficiency by eliminating unnecessary tool change operations and shortening travel distances by 165 to 1675 millimeters wherever structurally permissible.
Industrial-Grade Robust Robot Vision for Screw Detection and Removal under Uneven Conditions
Mar 31, 2026As the amount of used home appliances is expected to increase despite the decreasing labor force in Japan, there is a need to automate disassembling processes at recycling plants. The automation of disassembling air conditioner outdoor units, however, remains a challenge due to unit size variations and exposure to dirt and rust. To address these challenges, this study proposes an automated system that integrates a task-specific two-stage detection method and a lattice-based local calibration strategy. This approach achieved a screw detection recall of 99.8% despite severe degradation and ensured a manipulation accuracy of +/-0.75 mm without pre-programmed coordinates. In real-world validation with 120 units, the system attained a disassembly success rate of 78.3% and an average cycle time of 193 seconds, confirming its feasibility for industrial application.
Hierarchical Planning and Scheduling for Reconfigurable Multi-Robot Disassembly Systems under Structural Constraints
Sep 18, 2025This study presents a system integration approach for planning schedules, sequences, tasks, and motions for reconfigurable robots to automatically disassemble constrained structures in a non-destructive manner. Such systems must adapt their configuration and coordination to the target structure, but the large and complex search space makes them prone to local optima. To address this, we integrate multiple robot arms equipped with different types of tools, together with a rotary stage, into a reconfigurable setup. This flexible system is based on a hierarchical optimization method that generates plans meeting multiple preferred conditions under mandatory requirements within a realistic timeframe. The approach employs two many-objective genetic algorithms for sequence and task planning with motion evaluations, followed by constraint programming for scheduling. Because sequence planning has a much larger search space, we introduce a chromosome initialization method tailored to constrained structures to mitigate the risk of local optima. Simulation results demonstrate that the proposed method effectively solves complex problems in reconfigurable robotic disassembly.
Robotic Stroke Motion Following the Shape of the Human Back: Motion Generation and Psychological Effects
May 10, 2024



In this study, to perform the robotic stroke motions following the shape of the human back similar to the stroke motions by humans, in contrast to the conventional robotic stroke motion with a linear trajectory, we propose a trajectory generation method for a robotic stroke motion following the shape of the human back. We confirmed that the accuracy of the method's trajectory was close to that of the actual stroking motion by a human. Furthermore, we conducted a subjective experiment to evaluate the psychological effects of the proposed stroke motion in contrast to those of the conventional stroke motion with a linear trajectory. The experimental results showed that the actual stroke motion following the shape of the human back tended to evoke more pleasant and active feelings than the conventional stroke motion.
Many-Objective-Optimized Semi-Automated Robotic Disassembly Sequences
Jan 03, 2024



This study tasckles the problem of many-objective sequence optimization for semi-automated robotic disassembly operations. To this end, we employ a many-objective genetic algorithm (MaOGA) algorithm inspired by the Non-dominated Sorting Genetic Algorithm (NSGA)-III, along with robotic-disassembly-oriented constraints and objective functions derived from geometrical and robot simulations using 3-dimensional (3D) geometrical information stored in a 3D Computer-Aided Design (CAD) model of the target product. The MaOGA begins by generating a set of initial chromosomes based on a contact and connection graph (CCG), rather than random chromosomes, to avoid falling into a local minimum and yield repeatable convergence. The optimization imposes constraints on feasibility and stability as well as objective functions regarding difficulty, efficiency, prioritization, and allocability to generate a sequence that satisfies many preferred conditions under mandatory requirements for semi-automated robotic disassembly. The NSGA-III-inspired MaOGA also utilizes non-dominated sorting and niching with reference lines to further encourage steady and stable exploration and uniformly lower the overall evaluation values. Our sequence generation experiments for a complex product (36 parts) demonstrated that the proposed method can consistently produce feasible and stable sequences with a 100% success rate, bringing the multiple preferred conditions closer to the optimal solution required for semi-automated robotic disassembly operations.
Toward an Affective Touch Robot: Subjective and Physiological Evaluation of Gentle Stroke Motion Using a Human-Imitation Hand
Dec 09, 2020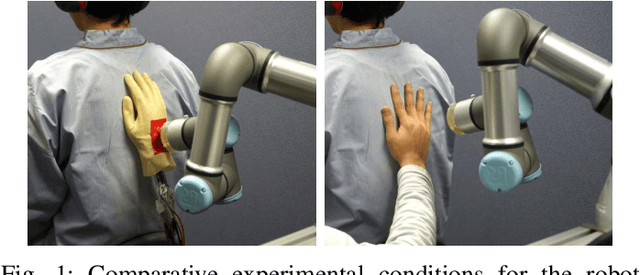
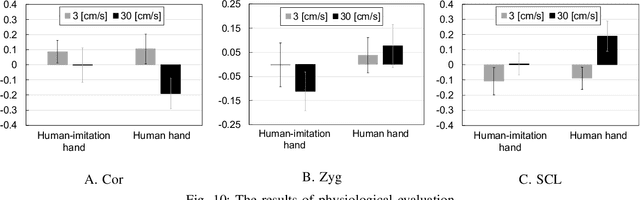
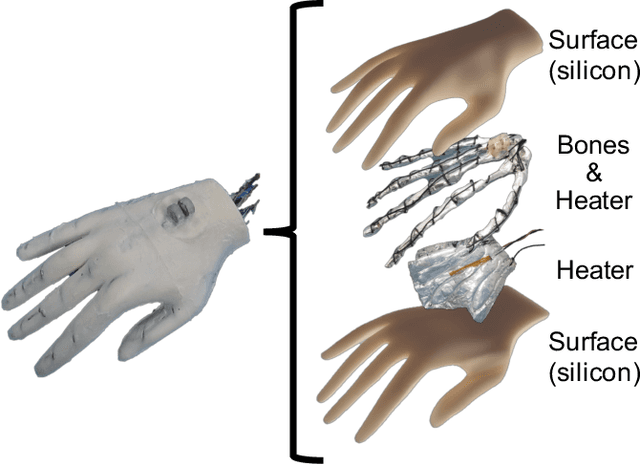
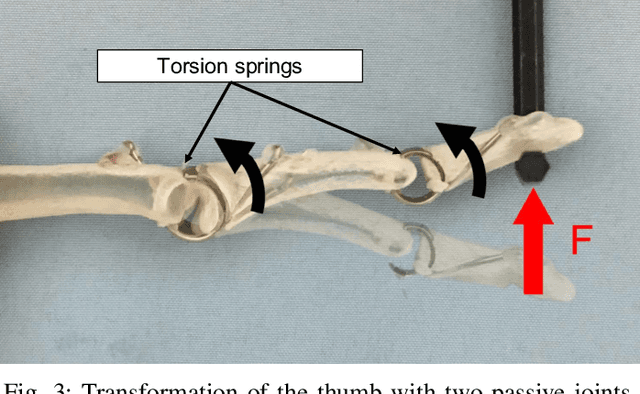
Affective touch offers positive psychological and physiological benefits such as the mitigation of stress and pain. If a robot could realize human-like affective touch, it would open up new application areas, including supporting care work. In this research, we focused on the gentle stroking motion of a robot to evoke the same emotions that human touch would evoke: in other words, an affective touch robot. We propose a robot that is able to gently stroke the back of a human using our designed human-imitation hand. To evaluate the emotional effects of this affective touch, we compared the results of a combination of two agents (the human-imitation hand and the human hand), at two stroke speeds (3 and 30 cm/s). The results of the subjective and physiological evaluations highlighted the following three findings: 1) the subjects evaluated strokes similarly with regard to the stroke speed of the human and human-imitation hand, in both the subjective and physiological evaluations; 2) the subjects felt greater pleasure and arousal at the faster stroke rate (30 cm/s rather than 3 cm/s); and 3) poorer fitting of the human-imitation hand due to the bending of the back had a negative emotional effect on the subjects.