 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Stroke Motion Following the Shape of the Human Back: Motion Generation and Psychological Effects
May 10, 2024In this study, to perform the robotic stroke motions following the shape of the human back similar to the stroke motions by humans, in contrast to the conventional robotic stroke motion with a linear trajectory, we propose a trajectory generation method for a robotic stroke motion following the shape of the human back. We confirmed that the accuracy of the method's trajectory was close to that of the actual stroking motion by a human. Furthermore, we conducted a subjective experiment to evaluate the psychological effects of the proposed stroke motion in contrast to those of the conventional stroke motion with a linear trajectory. The experimental results showed that the actual stroke motion following the shape of the human back tended to evoke more pleasant and active feelings than the conventional stroke motion.
Toward an Affective Touch Robot: Subjective and Physiological Evaluation of Gentle Stroke Motion Using a Human-Imitation Hand
Dec 09, 2020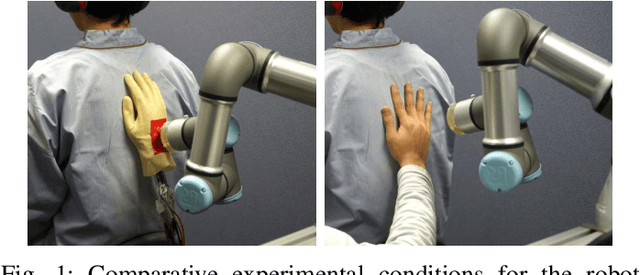
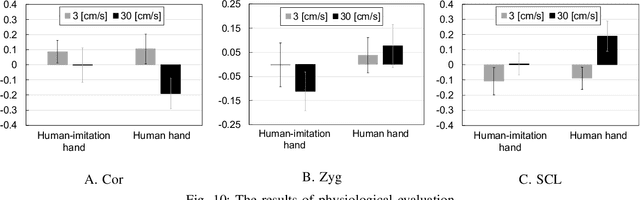
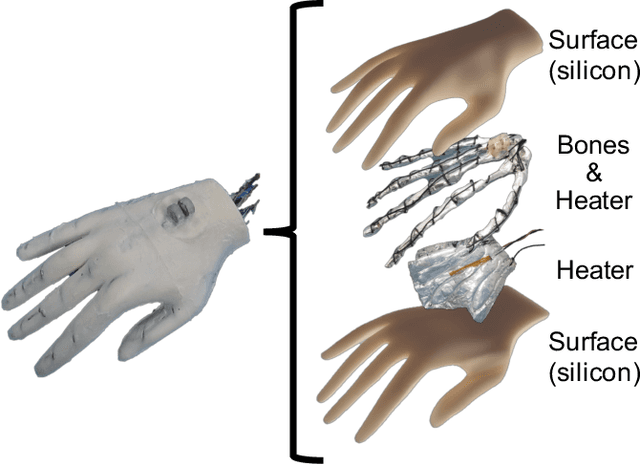
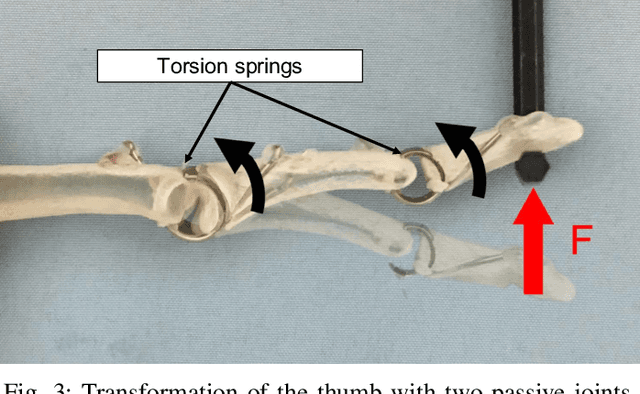
Affective touch offers positive psychological and physiological benefits such as the mitigation of stress and pain. If a robot could realize human-like affective touch, it would open up new application areas, including supporting care work. In this research, we focused on the gentle stroking motion of a robot to evoke the same emotions that human touch would evoke: in other words, an affective touch robot. We propose a robot that is able to gently stroke the back of a human using our designed human-imitation hand. To evaluate the emotional effects of this affective touch, we compared the results of a combination of two agents (the human-imitation hand and the human hand), at two stroke speeds (3 and 30 cm/s). The results of the subjective and physiological evaluations highlighted the following three findings: 1) the subjects evaluated strokes similarly with regard to the stroke speed of the human and human-imitation hand, in both the subjective and physiological evaluations; 2) the subjects felt greater pleasure and arousal at the faster stroke rate (30 cm/s rather than 3 cm/s); and 3) poorer fitting of the human-imitation hand due to the bending of the back had a negative emotional effect on the subjects.
Control of Walking Assist Exoskeleton with Time-delay Based on the Prediction of Plantar Force
Jul 17, 2020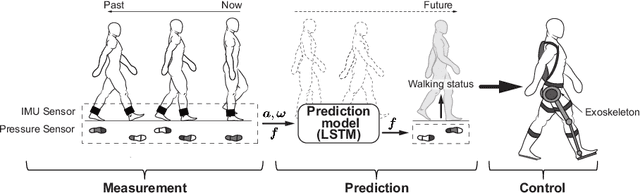

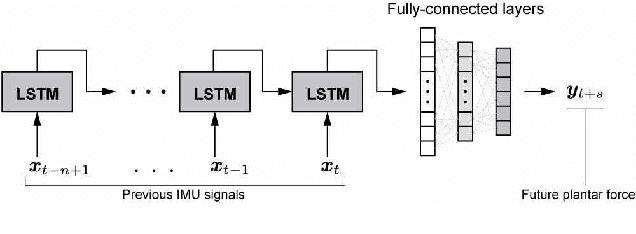
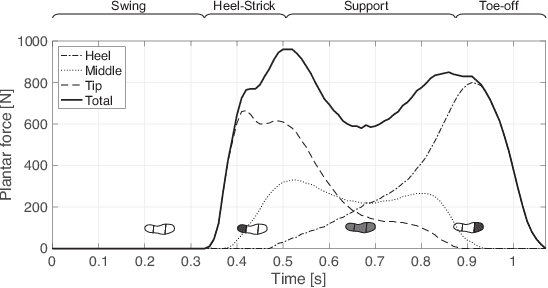
Many kinds of lower-limb exoskeletons were developed for walking assistance. However, when controlling these exoskeletons, time-delay due to the computation time and the communication delays is still a general problem. In this research, we propose a novel method to prevent the time-delay when controlling a walking assist exoskeleton by predicting the future plantar force and walking status. By using Long Short-Term Memory and a fully-connected network, the plantar force can be predicted using only data measured by inertial measurement unit sensors, not only during the walking period but also at the start and end of walking. From the predicted plantar force, the walking status and the desired assistance timing can also be determined. By considering the time-delay and sending the control commands beforehand, the exoskeleton can be moved precisely on the desired assistance timing. In experiments, the prediction accuracy of the plantar force and the assistance timing are confirmed. The performance of the proposed method is also evaluated by using the trained model to control the exoskeleton.