 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Facial Expressions of an Android Robot Effectively: a Bayesian Optimization Approach
Jan 13, 2023Expressing various facial emotions is an important social ability for efficient communication between humans. A key challenge in human-robot interaction research is providing androids with the ability to make various human-like facial expressions for efficient communication with humans. The android Nikola, we have developed, is equipped with many actuators for facial muscle control. While this enables Nikola to simulate various human expressions, it also complicates identification of the optimal parameters for producing desired expressions. Here, we propose a novel method that automatically optimizes the facial expressions of our android. We use a machine vision algorithm to evaluate the magnitudes of seven basic emotions, and employ the Bayesian Optimization algorithm to identify the parameters that produce the most convincing facial expressions. Evaluations by naive human participants demonstrate that our method improves the rated strength of the android's facial expressions of anger, disgust, sadness, and surprise compared with the previous method that relied on Ekman's theory and parameter adjustments by a human expert.
Toward an Affective Touch Robot: Subjective and Physiological Evaluation of Gentle Stroke Motion Using a Human-Imitation Hand
Dec 09, 2020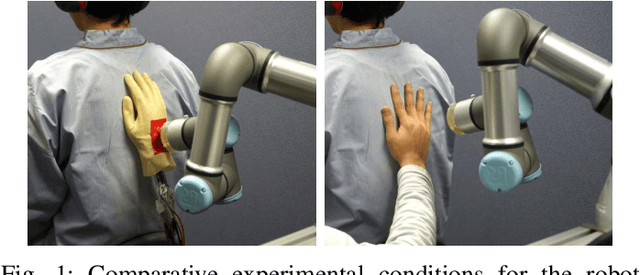
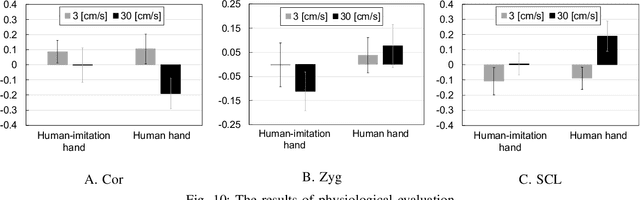
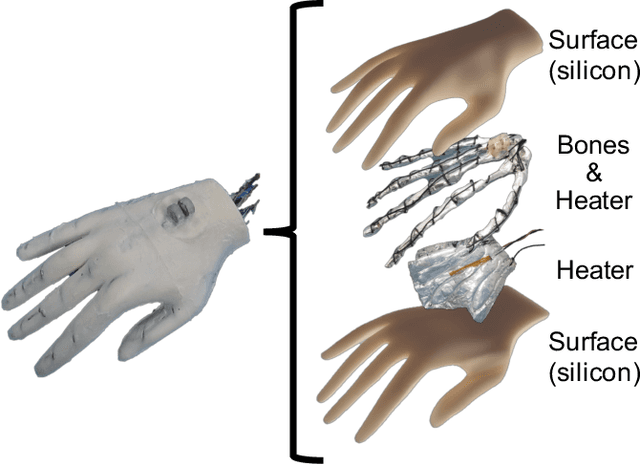
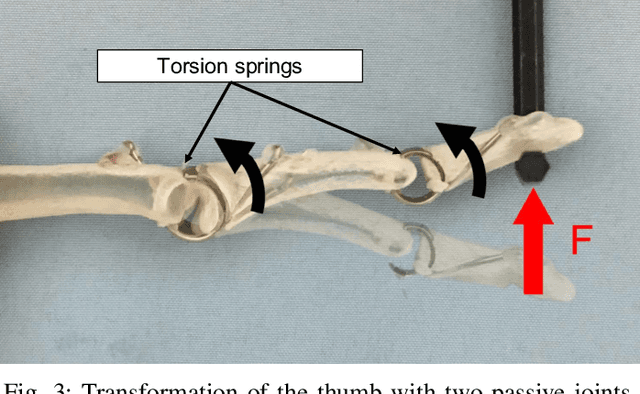
Affective touch offers positive psychological and physiological benefits such as the mitigation of stress and pain. If a robot could realize human-like affective touch, it would open up new application areas, including supporting care work. In this research, we focused on the gentle stroking motion of a robot to evoke the same emotions that human touch would evoke: in other words, an affective touch robot. We propose a robot that is able to gently stroke the back of a human using our designed human-imitation hand. To evaluate the emotional effects of this affective touch, we compared the results of a combination of two agents (the human-imitation hand and the human hand), at two stroke speeds (3 and 30 cm/s). The results of the subjective and physiological evaluations highlighted the following three findings: 1) the subjects evaluated strokes similarly with regard to the stroke speed of the human and human-imitation hand, in both the subjective and physiological evaluations; 2) the subjects felt greater pleasure and arousal at the faster stroke rate (30 cm/s rather than 3 cm/s); and 3) poorer fitting of the human-imitation hand due to the bending of the back had a negative emotional effect on the subjects.