 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft-Jig: A Flexible Sensing Jig for Simultaneously Fixing and Estimating Orientation of Assembly Parts
Sep 16, 2021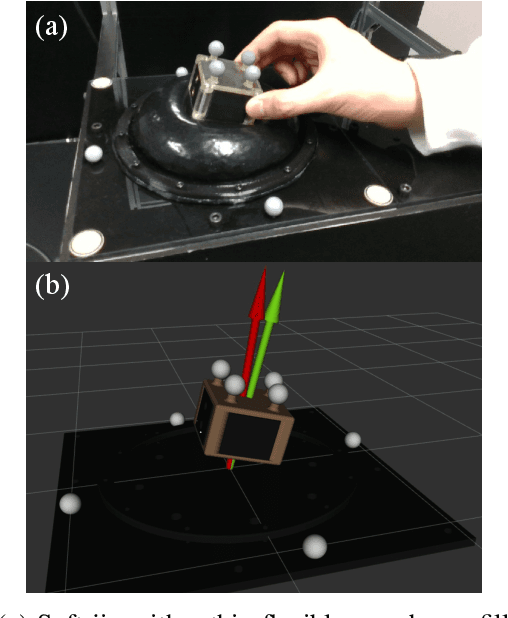
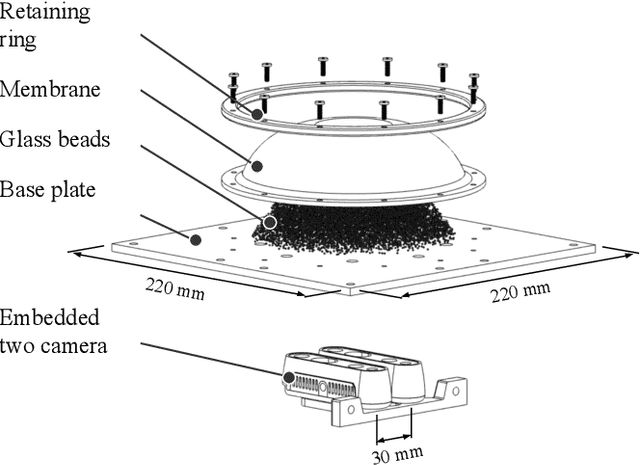
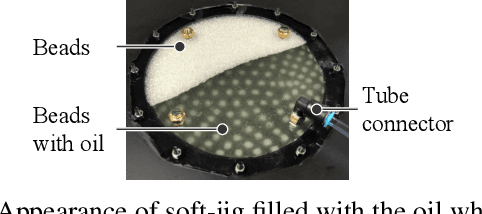

For assembly tasks, it is essential to firmly fix target parts and to accurately estimate their poses. Several rigid jigs for individual parts are frequently used in assembly factories to achieve precise and time-efficient product assembly. However, providing customized jigs is time-consuming. In this study, to address the lack of versatility in the shapes the jigs can be used for, we developed a flexible jig with a soft membrane including transparent beads and oil with a tuned refractive index. The bead-based jamming transition was accomplished by discharging only oil enabling a part to be firmly fixed. Because the two cameras under the jig are able to capture membrane shape changes, we proposed a sensing method to estimate the orientation of the part based on the behaviors of markers created on the jig's inner surface. Through estimation experiments, the proposed system could estimate the orientation of a cylindrical object with a diameter larger than 50 mm and an RMSE of less than 3 degrees.
Soft Jig-Driven Assembly Operations
Oct 21, 2020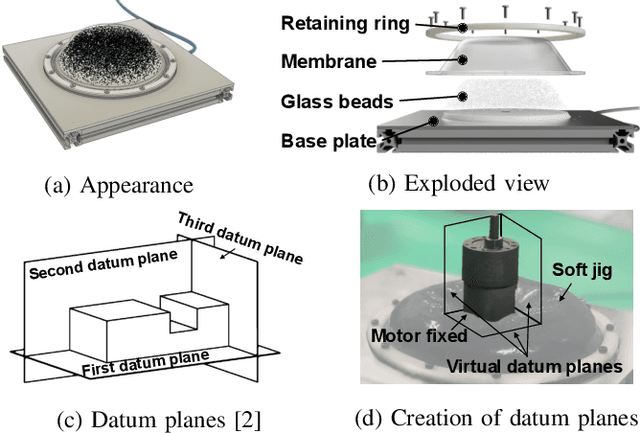
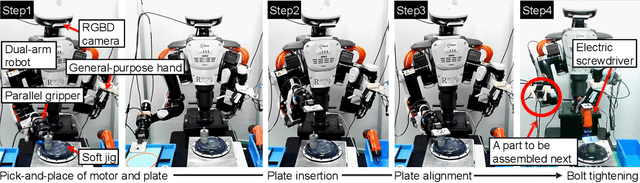

To design a general-purpose assembly robot system that can handle objects of various shapes, we propose a soft jig capable of deforming according to the shape of assembly parts. The soft jig is based on a jamming gripper used for robot manipulation as a general-purpose robotic gripper developed in the field of soft robotics. The soft jig has a flexible membrane made of silicone, which has a high friction, elongation, and contraction rate for keeping parts strictly fixed. The inside of the membrane is filled with glass beads to achieve a jamming transition. The usability of the soft jig was evaluated from the viewpoint of the versatility and fixing performance for various shapes and postures of parts in assembly operations.