Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Jig-Driven Assembly Operations
Paper and Code
Oct 21, 2020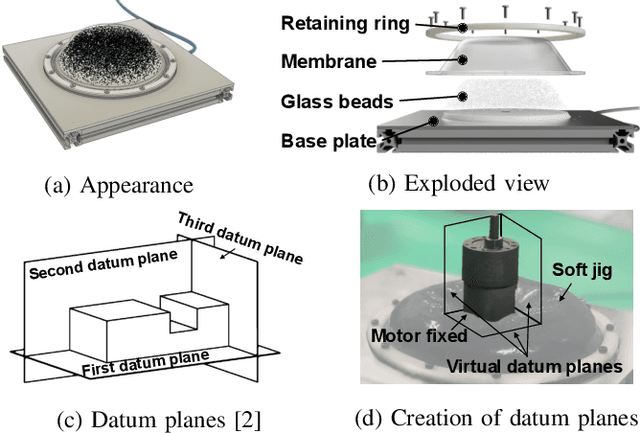
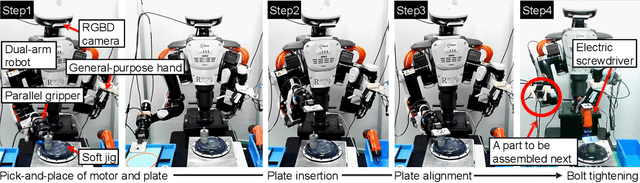

To design a general-purpose assembly robot system that can handle objects of various shapes, we propose a soft jig capable of deforming according to the shape of assembly parts. The soft jig is based on a jamming gripper used for robot manipulation as a general-purpose robotic gripper developed in the field of soft robotics. The soft jig has a flexible membrane made of silicone, which has a high friction, elongation, and contraction rate for keeping parts strictly fixed. The inside of the membrane is filled with glass beads to achieve a jamming transition. The usability of the soft jig was evaluated from the viewpoint of the versatility and fixing performance for various shapes and postures of parts in assembly operations.
* 7 pages, 12 figures
View paper on