 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssembly Sequences Based on Multiple Criteria Against Products with Deformable Parts
Paper and Code
Oct 21, 2020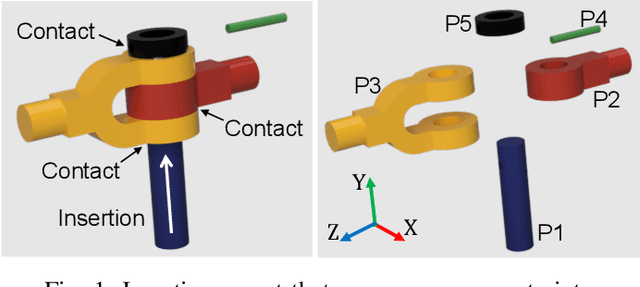

This study investigates assembly sequence generation by considering two tradeoff objectives: (1) insertion conditions and (2) degrees of constraints among assembled parts. A multiobjective genetic algorithm is used to balance these two objectives for planning robotic assembly. Furthermore, the method of extracting part relation matrices including interference-free, insertion, and degree of constraint matrices is extended for application to 3D computer-aided design (CAD) models, including deformable parts. The interference of deformable parts with other parts can be easily investigated by scaling models. A simulation experiment was conducted using the proposed method, and the results show the possibility of obtaining Pareto-optimal solutions of assembly sequences for a 3D CAD model with 33 parts including a deformable part. This approach can potentially be extended to handle various types of deformable parts and to explore graspable sequences during assembly operations.