 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrecise Drive with VLM: First Prize Solution for PRCV 2024 Drive LM challenge
Nov 05, 2024



This technical report outlines the methodologies we applied for the PRCV Challenge, focusing on cognition and decision-making in driving scenarios. We employed InternVL-2.0, a pioneering open-source multi-modal model, and enhanced it by refining both the model input and training methodologies. For the input data, we strategically concatenated and formatted the multi-view images. It is worth mentioning that we utilized the coordinates of the original images without transformation. In terms of model training, we initially pre-trained the model on publicly available autonomous driving scenario datasets to bolster its alignment capabilities of the challenge tasks, followed by fine-tuning on the DriveLM-nuscenes Dataset. During the fine-tuning phase, we innovatively modified the loss function to enhance the model's precision in predicting coordinate values. These approaches ensure that our model possesses advanced cognitive and decision-making capabilities in driving scenarios. Consequently, our model achieved a score of 0.6064, securing the first prize on the competition's final results.
EMIE-MAP: Large-Scale Road Surface Reconstruction Based on Explicit Mesh and Implicit Encoding
Mar 18, 2024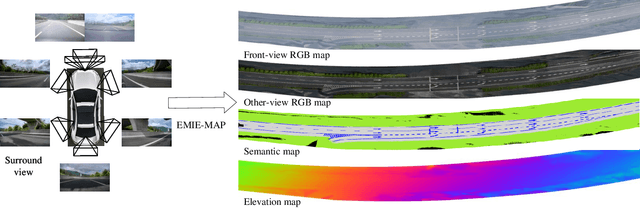

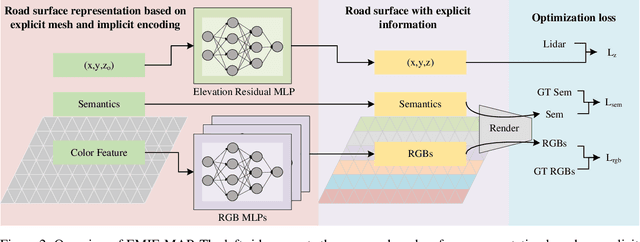
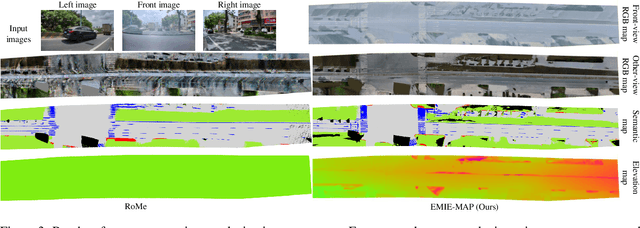
Road surface reconstruction plays a vital role in autonomous driving systems, enabling road lane perception and high-precision mapping. Recently, neural implicit encoding has achieved remarkable results in scene representation, particularly in the realistic rendering of scene textures. However, it faces challenges in directly representing geometric information for large-scale scenes. To address this, we propose EMIE-MAP, a novel method for large-scale road surface reconstruction based on explicit mesh and implicit encoding. The road geometry is represented using explicit mesh, where each vertex stores implicit encoding representing the color and semantic information. To overcome the difficulty in optimizing road elevation, we introduce a trajectory-based elevation initialization and an elevation residual learning method based on Multi-Layer Perceptron (MLP). Additionally, by employing implicit encoding and multi-camera color MLPs decoding, we achieve separate modeling of scene physical properties and camera characteristics, allowing surround-view reconstruction compatible with different camera models. Our method achieves remarkable road surface reconstruction performance in a variety of real-world challenging scenarios.