 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralised Gradient-based Variational Inference for Multi-sensor Fusion and Tracking in Clutter
Aug 24, 2024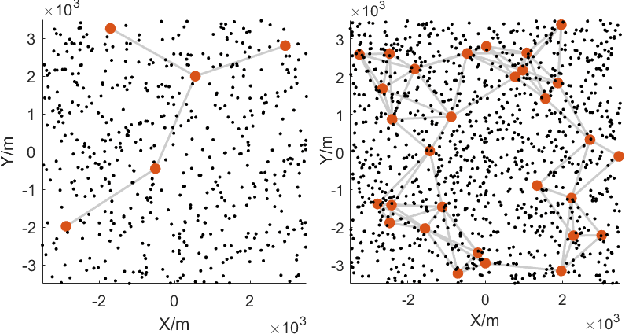
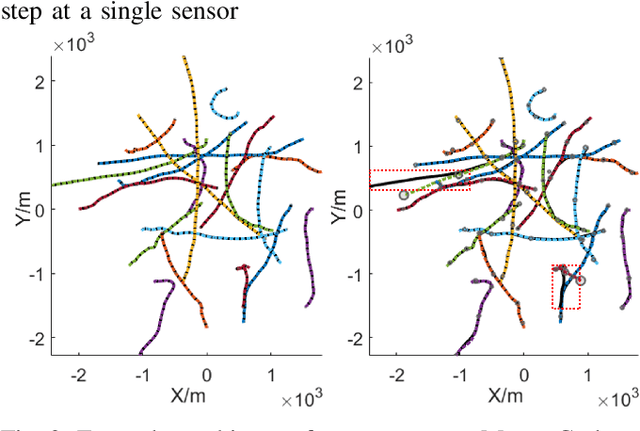
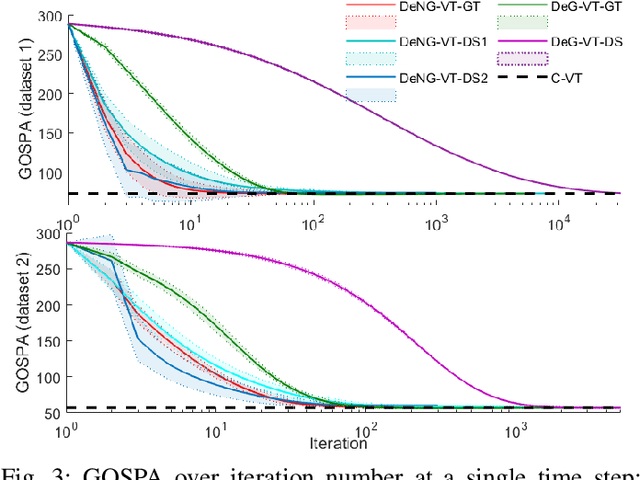
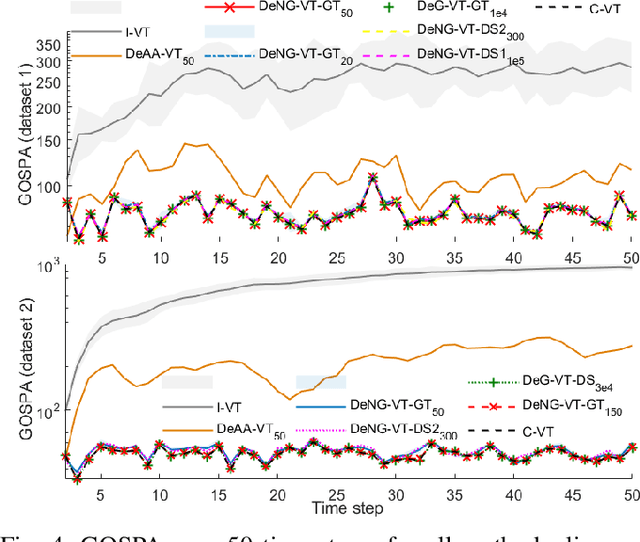
This paper investigates the task of tracking multiple objects in clutter under a distributed multi-sensor network with time-varying connectivity. Designed with the same objective as the centralised variational multi-object tracker, the proposed method achieves optimal decentralised fusion in performance with local processing and communication with only neighboring sensors. A key innovation is the decentralised construction of a locally maximised evidence lower bound, which greatly reduces the information required for communication. Our decentralised natural gradient descent variational multi-object tracker, enhanced with the gradient tracking strategy and natural gradients that adjusts the direction of traditional gradients to the steepest, shows rapid convergence. Our results verify that the proposed method is empirically equivalent to the centralised fusion in tracking accuracy, surpasses suboptimal fusion techniques with comparable costs, and achieves much lower communication overhead than the consensus-based variational multi-object tracker.
Generalised Hyperbolic State-space Models for Inference in Dynamic Systems
Sep 20, 2023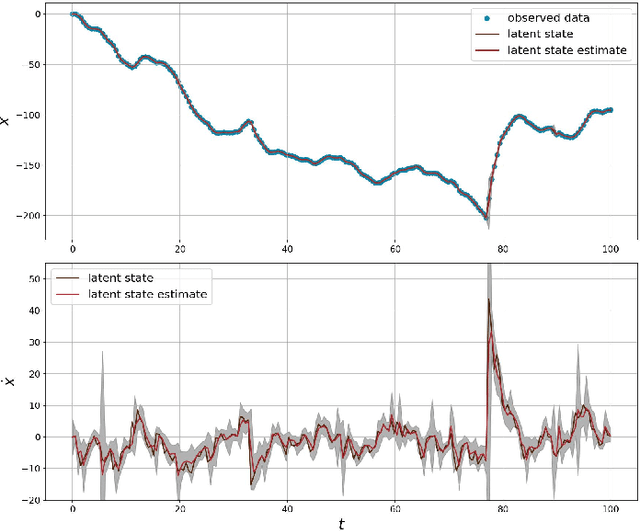
In this work we study linear vector stochastic differential equation (SDE) models driven by the generalised hyperbolic (GH) L\'evy process for inference in continuous-time non-Gaussian filtering problems. The GH family of stochastic processes offers a flexible framework for modelling of non-Gaussian, heavy-tailed characteristics and includes the normal inverse-Gaussian, variance-gamma and Student-t processes as special cases. We present continuous-time simulation methods for the solution of vector SDE models driven by GH processes and novel inference methodologies using a variant of sequential Markov chain Monte Carlo (MCMC). As an example a particular formulation of Langevin dynamics is studied within this framework. The model is applied to both a synthetically generated data set and a real-world financial series to demonstrate its capabilities.
Variational Tracking and Redetection for Closely-spaced Objects in Heavy Clutter
Sep 04, 2023



The non-homogeneous Poisson process (NHPP) is a widely used measurement model that allows for an object to generate multiple measurements over time. However, it can be difficult to efficiently and reliably track multiple objects under this NHPP model in scenarios with a high density of closely-spaced objects and heavy clutter. Therefore, based on the general coordinate ascent variational filtering framework, this paper presents a variational Bayes association-based NHPP tracker (VB-AbNHPP) that can efficiently perform tracking, data association, and learning of target and clutter rates with a parallelisable implementation. In addition, a variational localisation strategy is proposed, which enables rapid rediscovery of missed targets from a large surveillance area under extremely heavy clutter. This strategy is integrated into the VB-AbNHPP tracker, resulting in a robust methodology that can automatically detect and recover from track loss. This tracker demonstrates improved tracking performance compared with existing trackers in challenging scenarios, in terms of both accuracy and efficiency.
Consensus-based Distributed Variational Multi-object Tracker in Multi-Sensor Network
Sep 02, 2023The growing need for accurate and reliable tracking systems has driven significant progress in sensor fusion and object tracking techniques. In this paper, we design two variational Bayesian trackers that effectively track multiple targets in cluttered environments within a sensor network. We first present a centralised sensor fusion scheme, which involves transmitting sensor data to a fusion center. Then, we develop a distributed version leveraging the average consensus algorithm, which is theoretically equivalent to the centralised sensor fusion tracker and requires only local message passing with neighbouring sensors. In addition, we empirically verify that our proposed distributed variational tracker performs on par with the centralised version with equal tracking accuracy. Simulation results show that our distributed multi-target tracker outperforms the suboptimal distributed sensor fusion strategy that fuses each sensor's posterior based on arithmetic sensor fusion and an average consensus strategy.
Driver Profiling and Bayesian Workload Estimation Using Naturalistic Peripheral Detection Study Data
Mar 26, 2023



Monitoring drivers' mental workload facilitates initiating and maintaining safe interactions with in-vehicle information systems, and thus delivers adaptive human machine interaction with reduced impact on the primary task of driving. In this paper, we tackle the problem of workload estimation from driving performance data. First, we present a novel on-road study for collecting subjective workload data via a modified peripheral detection task in naturalistic settings. Key environmental factors that induce a high mental workload are identified via video analysis, e.g. junctions and behaviour of vehicle in front. Second, a supervised learning framework using state-of-the-art time series classifiers (e.g. convolutional neural network and transform techniques) is introduced to profile drivers based on the average workload they experience during a journey. A Bayesian filtering approach is then proposed for sequentially estimating, in (near) real-time, the driver's instantaneous workload. This computationally efficient and flexible method can be easily personalised to a driver (e.g. incorporate their inferred average workload profile), adapted to driving/environmental contexts (e.g. road type) and extended with data streams from new sources. The efficacy of the presented profiling and instantaneous workload estimation approaches are demonstrated using the on-road study data, showing $F_{1}$ scores of up to 92% and 81%, respectively.
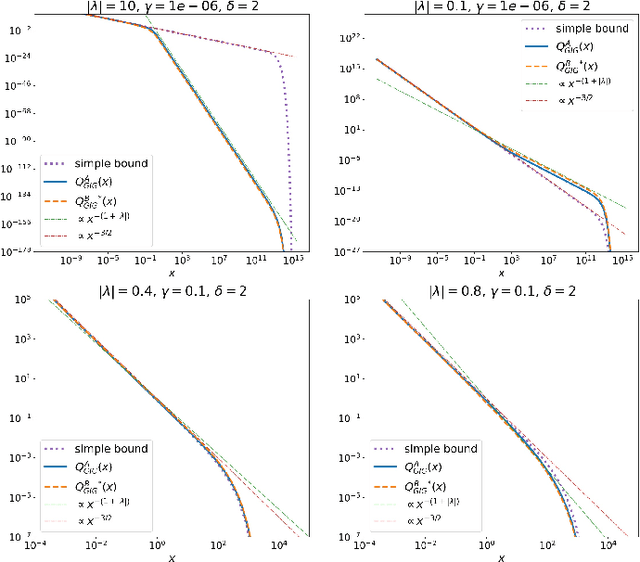
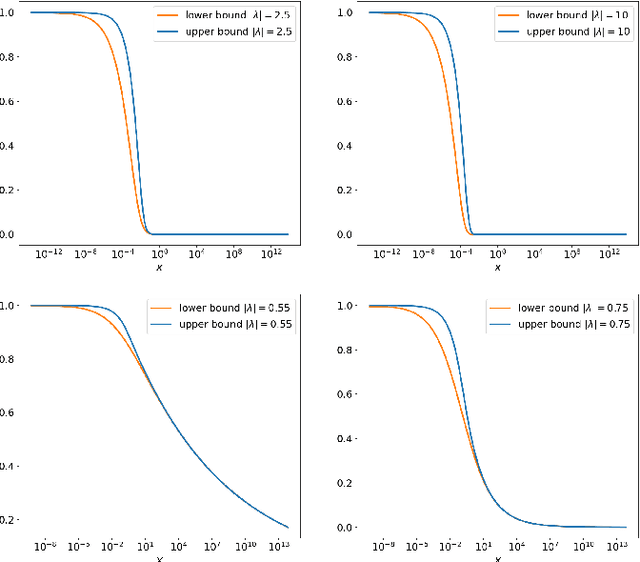
Point process simulation of generalised hyperbolic Lévy processes
Mar 18, 2023Generalised hyperbolic (GH) processes are a class of stochastic processes that are used to model the dynamics of a wide range of complex systems that exhibit heavy-tailed behavior, including systems in finance, economics, biology, and physics. In this paper, we present novel simulation methods based on subordination with a generalised inverse Gaussian (GIG) process and using a generalised shot-noise representation that involves random thinning of infinite series of decreasing jump sizes. Compared with our previous work on GIG processes, we provide tighter bounds for the construction of rejection sampling ratios, leading to improved acceptance probabilities in simulation. Furthermore, we derive methods for the adaptive determination of the number of points required in the associated random series using concentration inequalities. Residual small jumps are then approximated using an appropriately scaled Brownian motion term with drift. Finally the rejection sampling steps are made significantly more computationally efficient through the use of squeezing functions based on lower and upper bounds on the L\'evy density. Experimental results are presented illustrating the strong performance under various parameter settings and comparing the marginal distribution of the GH paths with exact simulations of GH random variates. The new simulation methodology is made available to researchers through the publication of a Python code repository.
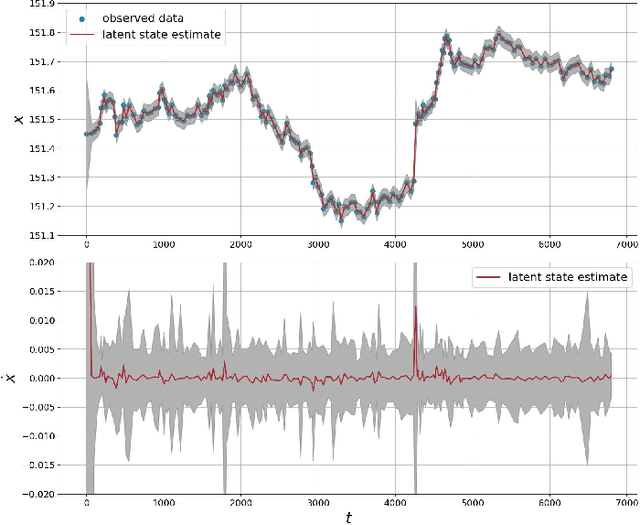
Non-Gaussian Process Regression
Sep 07, 2022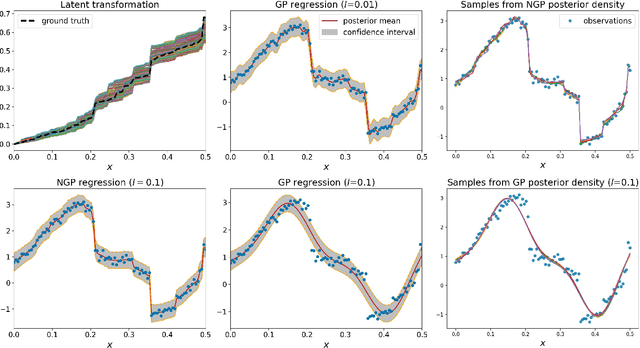
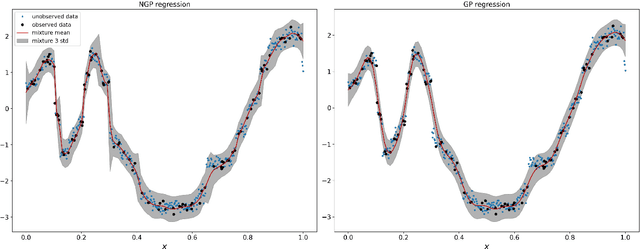
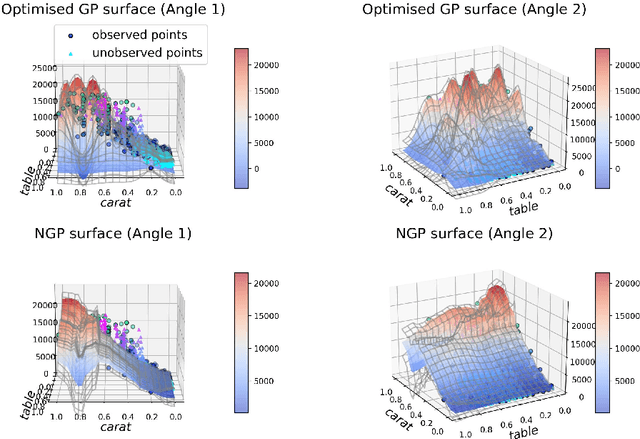
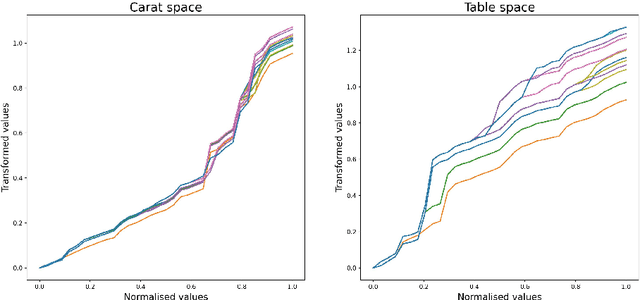
Standard GPs offer a flexible modelling tool for well-behaved processes. However, deviations from Gaussianity are expected to appear in real world datasets, with structural outliers and shocks routinely observed. In these cases GPs can fail to model uncertainty adequately and may over-smooth inferences. Here we extend the GP framework into a new class of time-changed GPs that allow for straightforward modelling of heavy-tailed non-Gaussian behaviours, while retaining a tractable conditional GP structure through an infinite mixture of non-homogeneous GPs representation. The conditional GP structure is obtained by conditioning the observations on a latent transformed input space and the random evolution of the latent transformation is modelled using a L\'{e}vy process which allows Bayesian inference in both the posterior predictive density and the latent transformation function. We present Markov chain Monte Carlo inference procedures for this model and demonstrate the potential benefits compared to a standard GP.
Point process simulation of Generalised inverse Gaussian processes and estimation of the Jaeger Integral
May 19, 2021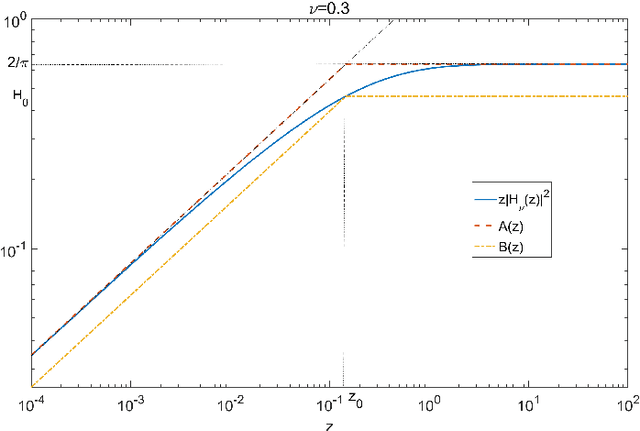
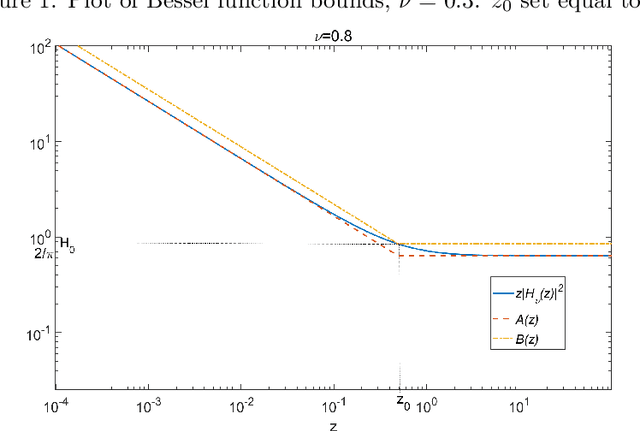
In this paper novel simulation methods are provided for the Generalised inverse Gaussian (GIG) L\'{e}vy process. Such processes are intractable for simulation except in certain special edge cases, since the L\'{e}vy density associated with the GIG process is expressed as an integral involving certain Bessel Functions, known as the Jaeger Integral in diffusive transport applications. We here show for the first time how to solve the problem indirectly, using generalised shot-noise methods to simulate the underlying point processes and constructing an auxiliary variables approach that avoids any direct calculation of the integrals involved. The augmented bivariate process is still intractable and so we propose a novel thinning method based on upper bounds on the intractable integrand. Moreover our approach leads to lower and upper bounds on the Jaeger integral itself, which may be compared with other approximation methods. We note that the GIG process is the required Brownian motion subordinator for the generalised hyperbolic (GH) L\'{e}vy process and so our simulation approach will straightforwardly extend also to the simulation of these intractable proceses. Our new methods will find application in forward simulation of processes of GIG and GH type, in financial and engineering data, for example, as well as inference for states and parameters of stochastic processes driven by GIG and GH L\'{e}vy processes.
Unsupervised Nonlinear Spectral Unmixing based on a Multilinear Mixing Model
Apr 14, 2016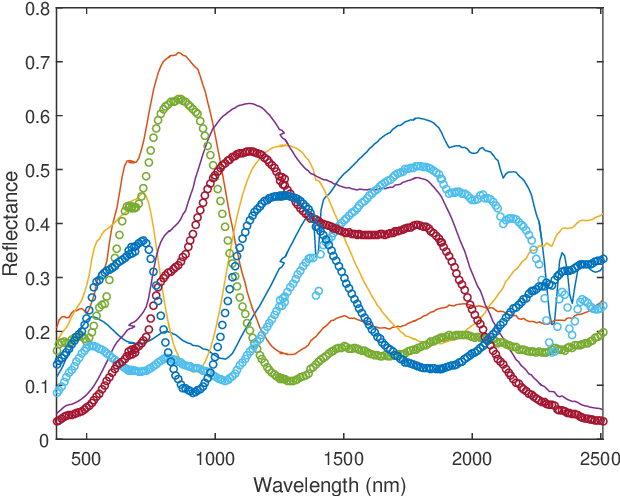
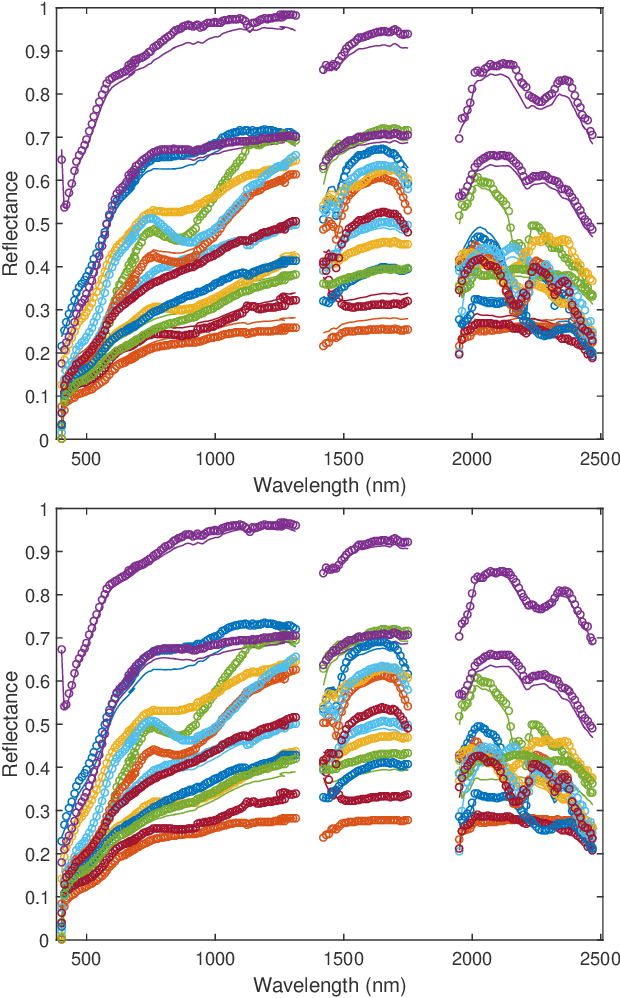
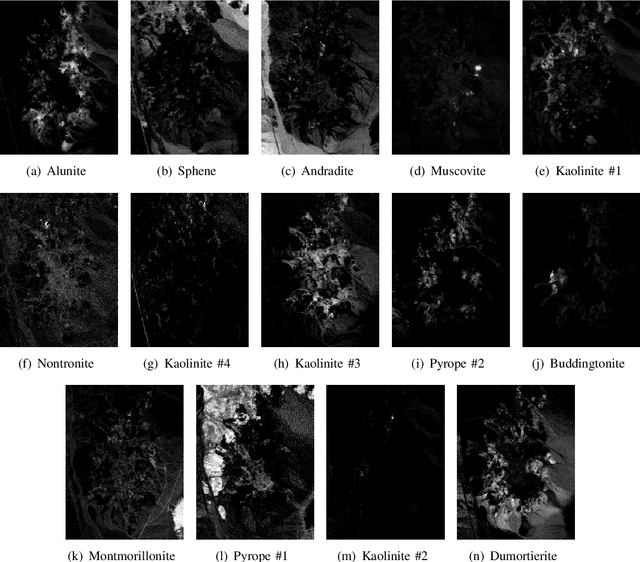
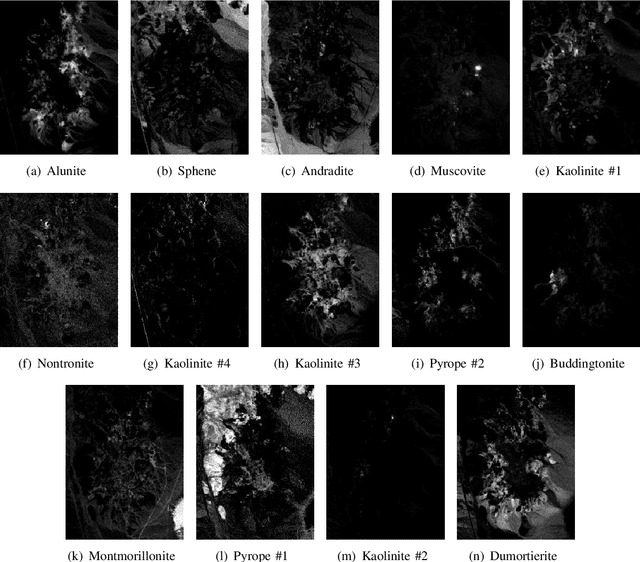
In the community of remote sensing, nonlinear mixing models have recently received particular attention in hyperspectral image processing. In this paper, we present a novel nonlinear spectral unmixing method following the recent multilinear mixing model of [1], which includes an infinite number of terms related to interactions between different endmembers. The proposed unmixing method is unsupervised in the sense that the endmembers are estimated jointly with the abundances and other parameters of interest, i.e., the transition probability of undergoing further interactions. Non-negativity and sum-to one constraints are imposed on abundances while only nonnegativity is considered for endmembers. The resulting unmixing problem is formulated as a constrained nonlinear optimization problem, which is solved by a block coordinate descent strategy, consisting of updating the endmembers, abundances and transition probability iteratively. The proposed method is evaluated and compared with linear unmixing methods for synthetic and real hyperspectral datasets acquired by the AVIRIS sensor. The advantage of using non-linear unmixing as opposed to linear unmixing is clearly shown in these examples.
R-FUSE: Robust Fast Fusion of Multi-Band Images Based on Solving a Sylvester Equation
Apr 06, 2016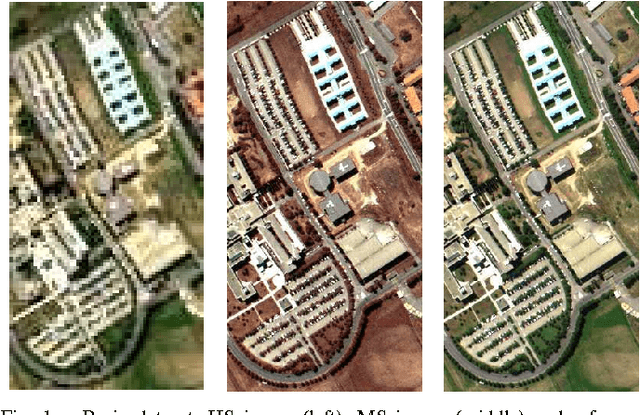
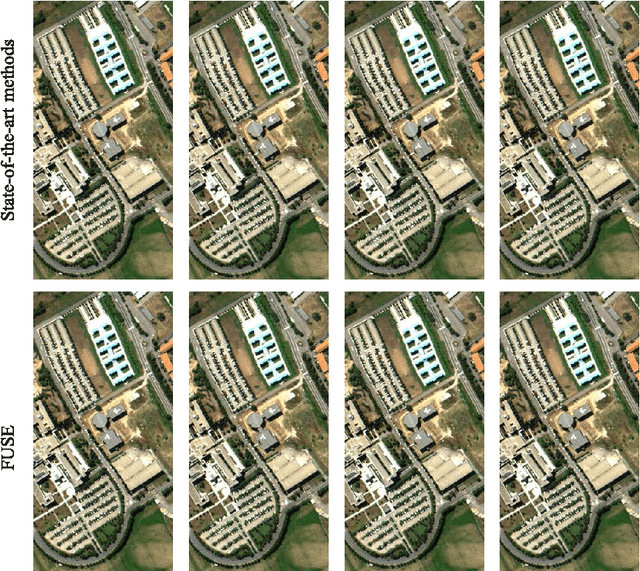
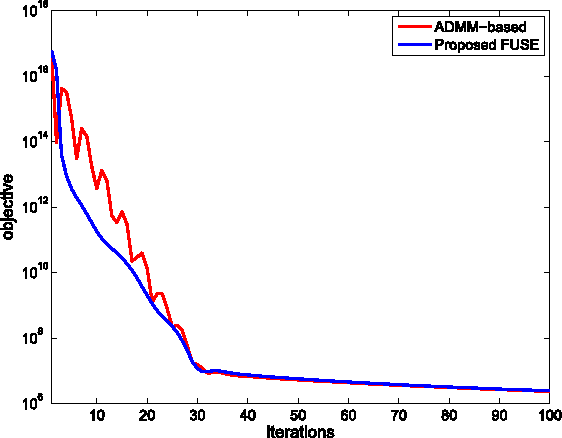
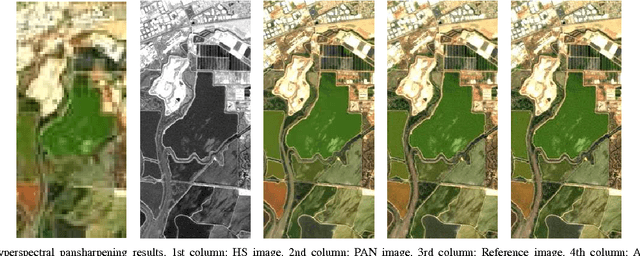
This paper proposes a robust fast multi-band image fusion method to merge a high-spatial low-spectral resolution image and a low-spatial high-spectral resolution image. Following the method recently developed in [1], the generalized Sylvester matrix equation associated with the multi-band image fusion problem is solved in a more robust and efficient way by exploiting the Woodbury formula, avoiding any permutation operation in the frequency domain as well as the blurring kernel invertibility assumption required in [1]. Thanks to this improvement, the proposed algorithm requires fewer computational operations and is also more robust with respect to the blurring kernel compared with the one in [1]. The proposed new algorithm is tested with different priors considered in [1]. Our conclusion is that the proposed fusion algorithm is more robust than the one in [1] with a reduced computational cost.