 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriver Profiling and Bayesian Workload Estimation Using Naturalistic Peripheral Detection Study Data
Mar 26, 2023



Monitoring drivers' mental workload facilitates initiating and maintaining safe interactions with in-vehicle information systems, and thus delivers adaptive human machine interaction with reduced impact on the primary task of driving. In this paper, we tackle the problem of workload estimation from driving performance data. First, we present a novel on-road study for collecting subjective workload data via a modified peripheral detection task in naturalistic settings. Key environmental factors that induce a high mental workload are identified via video analysis, e.g. junctions and behaviour of vehicle in front. Second, a supervised learning framework using state-of-the-art time series classifiers (e.g. convolutional neural network and transform techniques) is introduced to profile drivers based on the average workload they experience during a journey. A Bayesian filtering approach is then proposed for sequentially estimating, in (near) real-time, the driver's instantaneous workload. This computationally efficient and flexible method can be easily personalised to a driver (e.g. incorporate their inferred average workload profile), adapted to driving/environmental contexts (e.g. road type) and extended with data streams from new sources. The efficacy of the presented profiling and instantaneous workload estimation approaches are demonstrated using the on-road study data, showing $F_{1}$ scores of up to 92% and 81%, respectively.
Lane-Change Initiation and Planning Approach for Highly Automated Driving on Freeways
Jul 29, 2020
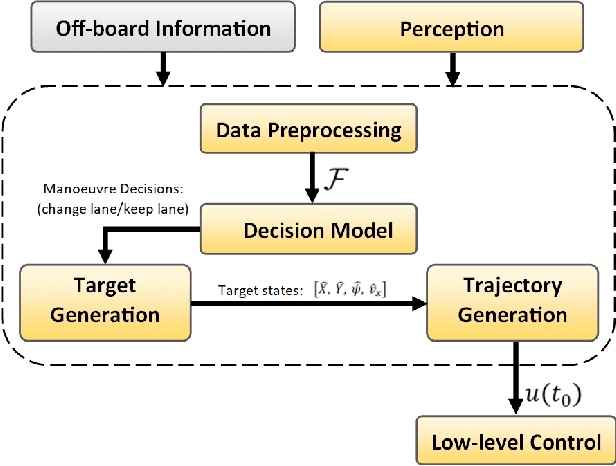
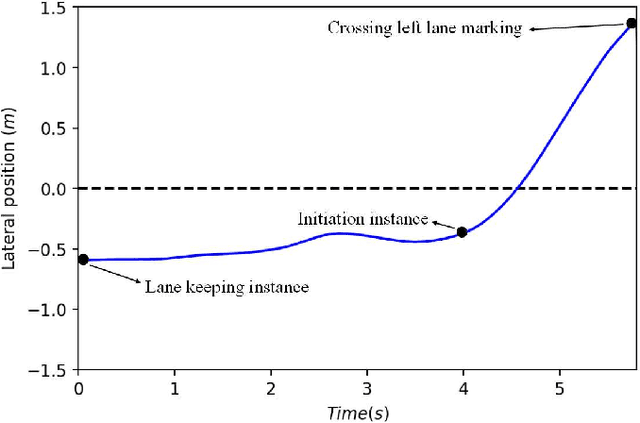
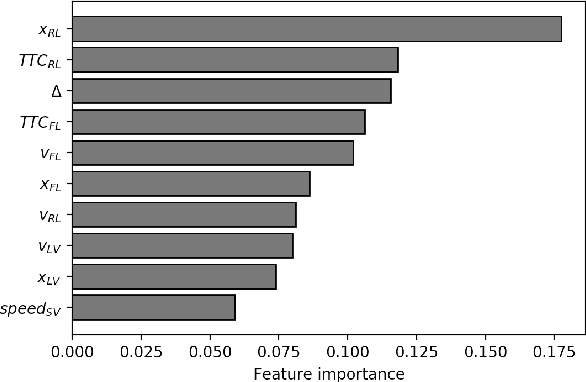
Quantifying and encoding occupants' preferences as an objective function for the tactical decision making of autonomous vehicles is a challenging task. This paper presents a low-complexity approach for lane-change initiation and planning to facilitate highly automated driving on freeways. Conditions under which human drivers find different manoeuvres desirable are learned from naturalistic driving data, eliminating the need for an engineered objective function and incorporation of expert knowledge in form of rules. Motion planning is formulated as a finite-horizon optimisation problem with safety constraints. It is shown that the decision model can replicate human drivers' discretionary lane-change decisions with up to 92% accuracy. Further proof of concept simulation of an overtaking manoeuvre is shown, whereby the actions of the simulated vehicle are logged while the dynamic environment evolves as per ground truth data recordings.