 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecision Making for Autonomous Driving in Interactive Merge Scenarios via Learning-based Prediction
Mar 29, 2023



Autonomous agents that drive on roads shared with human drivers must reason about the nuanced interactions among traffic participants. This poses a highly challenging decision making problem since human behavior is influenced by a multitude of factors (e.g., human intentions and emotions) that are hard to model. This paper presents a decision making approach for autonomous driving, focusing on the complex task of merging into moving traffic where uncertainty emanates from the behavior of other drivers and imperfect sensor measurements. We frame the problem as a partially observable Markov decision process (POMDP) and solve it online with Monte Carlo tree search. The solution to the POMDP is a policy that performs high-level driving maneuvers, such as giving way to an approaching car, keeping a safe distance from the vehicle in front or merging into traffic. Our method leverages a model learned from data to predict the future states of traffic while explicitly accounting for interactions among the surrounding agents. From these predictions, the autonomous vehicle can anticipate the future consequences of its actions on the environment and optimize its trajectory accordingly. We thoroughly test our approach in simulation, showing that the autonomous vehicle can adapt its behavior to different situations. We also compare against other methods, demonstrating an improvement with respect to the considered performance metrics.
Learning an Interpretable Model for Driver Behavior Prediction with Inductive Biases
Jul 31, 2022


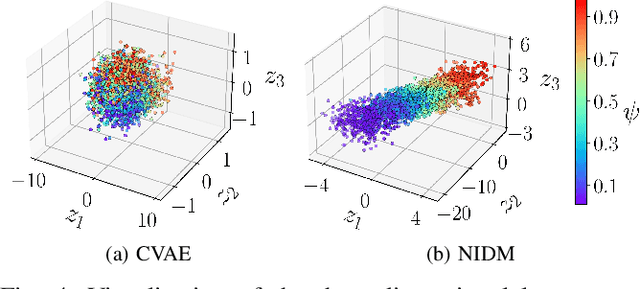
To plan safe maneuvers and act with foresight, autonomous vehicles must be capable of accurately predicting the uncertain future. In the context of autonomous driving, deep neural networks have been successfully applied to learning predictive models of human driving behavior from data. However, the predictions suffer from cascading errors, resulting in large inaccuracies over long time horizons. Furthermore, the learned models are black boxes, and thus it is often unclear how they arrive at their predictions. In contrast, rule-based models, which are informed by human experts, maintain long-term coherence in their predictions and are human-interpretable. However, such models often lack the sufficient expressiveness needed to capture complex real-world dynamics. In this work, we begin to close this gap by embedding the Intelligent Driver Model, a popular hand-crafted driver model, into deep neural networks. Our model's transparency can offer considerable advantages, e.g., in debugging the model and more easily interpreting its predictions. We evaluate our approach on a simulated merging scenario, showing that it yields a robust model that is end-to-end trainable and provides greater transparency at no cost to the model's predictive accuracy.
Lane-Change Initiation and Planning Approach for Highly Automated Driving on Freeways
Jul 29, 2020
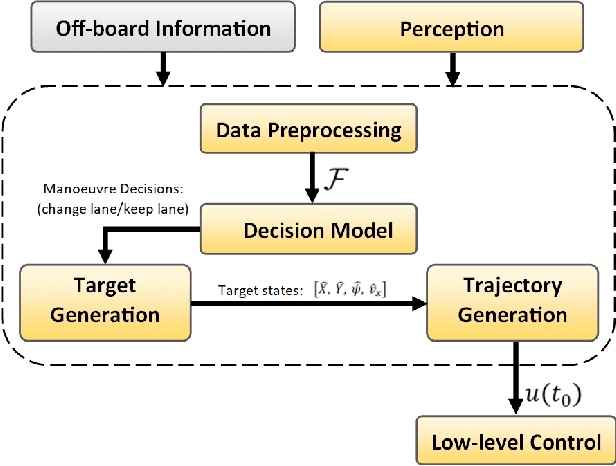
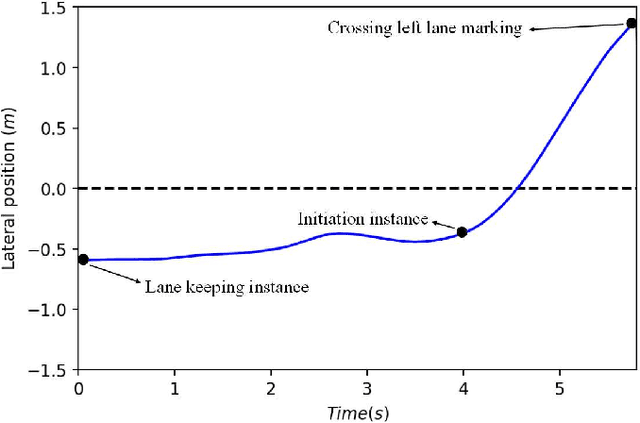
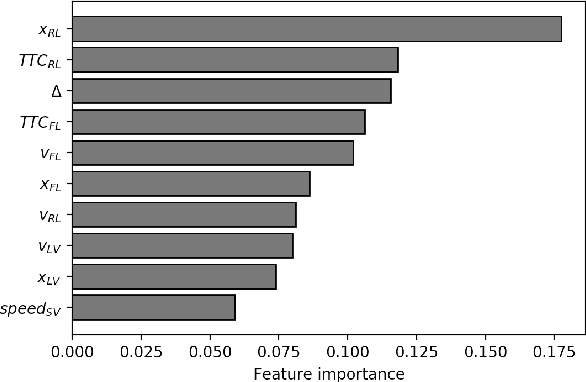
Quantifying and encoding occupants' preferences as an objective function for the tactical decision making of autonomous vehicles is a challenging task. This paper presents a low-complexity approach for lane-change initiation and planning to facilitate highly automated driving on freeways. Conditions under which human drivers find different manoeuvres desirable are learned from naturalistic driving data, eliminating the need for an engineered objective function and incorporation of expert knowledge in form of rules. Motion planning is formulated as a finite-horizon optimisation problem with safety constraints. It is shown that the decision model can replicate human drivers' discretionary lane-change decisions with up to 92% accuracy. Further proof of concept simulation of an overtaking manoeuvre is shown, whereby the actions of the simulated vehicle are logged while the dynamic environment evolves as per ground truth data recordings.