 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLane-Change Initiation and Planning Approach for Highly Automated Driving on Freeways
Paper and Code
Jul 29, 2020
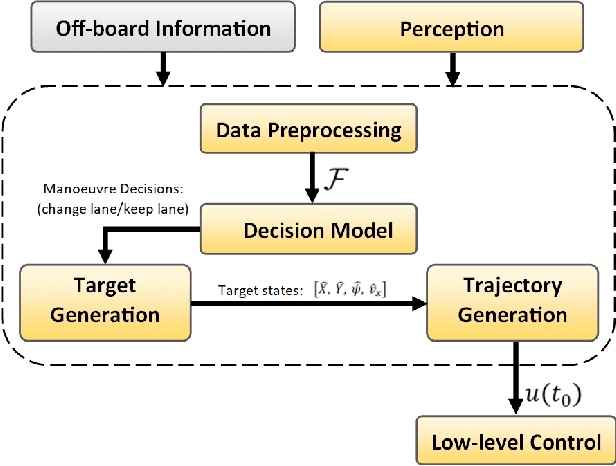
Quantifying and encoding occupants' preferences as an objective function for the tactical decision making of autonomous vehicles is a challenging task. This paper presents a low-complexity approach for lane-change initiation and planning to facilitate highly automated driving on freeways. Conditions under which human drivers find different manoeuvres desirable are learned from naturalistic driving data, eliminating the need for an engineered objective function and incorporation of expert knowledge in form of rules. Motion planning is formulated as a finite-horizon optimisation problem with safety constraints. It is shown that the decision model can replicate human drivers' discretionary lane-change decisions with up to 92% accuracy. Further proof of concept simulation of an overtaking manoeuvre is shown, whereby the actions of the simulated vehicle are logged while the dynamic environment evolves as per ground truth data recordings.