 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Expectation Propagation for Multi-Object Tracking over Sensor Networks
May 24, 2025In this paper, we present a novel distributed expectation propagation algorithm for multiple sensors, multiple objects tracking in cluttered environments. The proposed framework enables each sensor to operate locally while collaboratively exchanging moment estimates with other sensors, thus eliminating the need to transmit all data to a central processing node. Specifically, we introduce a fast and parallelisable Rao-Blackwellised Gibbs sampling scheme to approximate the tilted distributions, which enhances the accuracy and efficiency of expectation propagation updates. Results demonstrate that the proposed algorithm improves both communication and inference efficiency for multi-object tracking tasks with dynamic sensor connectivity and varying clutter levels.
Decentralised Gradient-based Variational Inference for Multi-sensor Fusion and Tracking in Clutter
Aug 24, 2024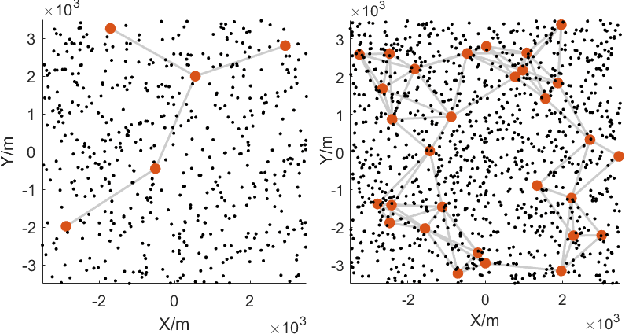
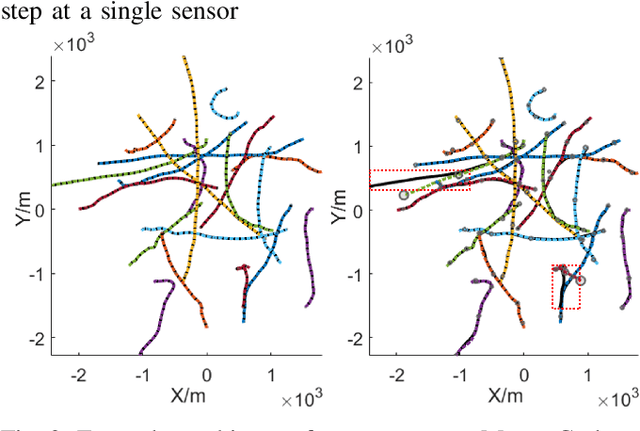
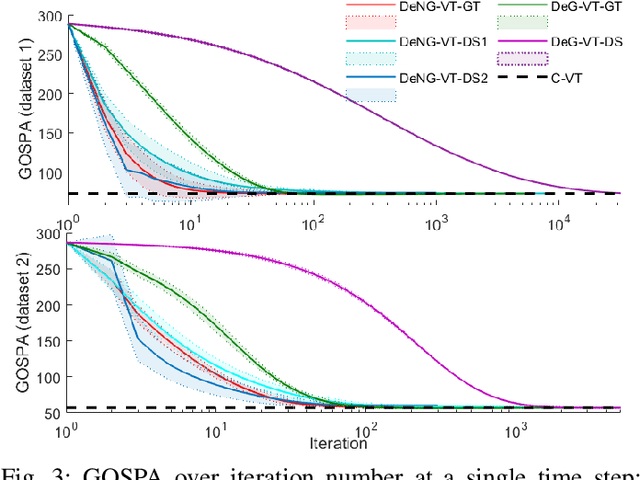
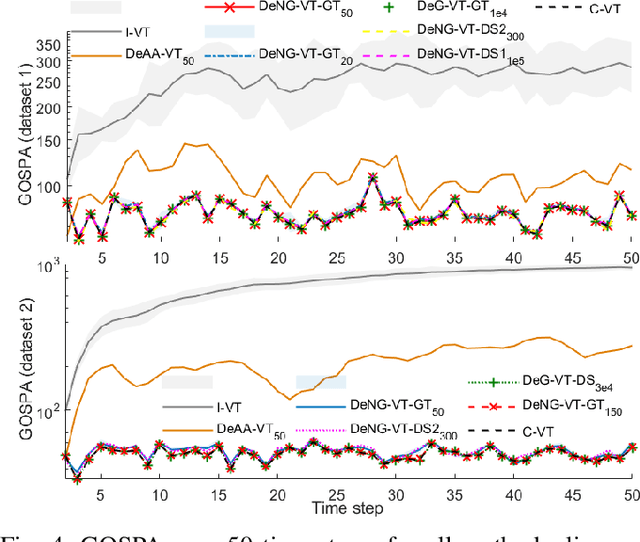
This paper investigates the task of tracking multiple objects in clutter under a distributed multi-sensor network with time-varying connectivity. Designed with the same objective as the centralised variational multi-object tracker, the proposed method achieves optimal decentralised fusion in performance with local processing and communication with only neighboring sensors. A key innovation is the decentralised construction of a locally maximised evidence lower bound, which greatly reduces the information required for communication. Our decentralised natural gradient descent variational multi-object tracker, enhanced with the gradient tracking strategy and natural gradients that adjusts the direction of traditional gradients to the steepest, shows rapid convergence. Our results verify that the proposed method is empirically equivalent to the centralised fusion in tracking accuracy, surpasses suboptimal fusion techniques with comparable costs, and achieves much lower communication overhead than the consensus-based variational multi-object tracker.
DR-Pose: A Two-stage Deformation-and-Registration Pipeline for Category-level 6D Object Pose Estimation
Sep 05, 2023Category-level object pose estimation involves estimating the 6D pose and the 3D metric size of objects from predetermined categories. While recent approaches take categorical shape prior information as reference to improve pose estimation accuracy, the single-stage network design and training manner lead to sub-optimal performance since there are two distinct tasks in the pipeline. In this paper, the advantage of two-stage pipeline over single-stage design is discussed. To this end, we propose a two-stage deformation-and registration pipeline called DR-Pose, which consists of completion-aided deformation stage and scaled registration stage. The first stage uses a point cloud completion method to generate unseen parts of target object, guiding subsequent deformation on the shape prior. In the second stage, a novel registration network is designed to extract pose-sensitive features and predict the representation of object partial point cloud in canonical space based on the deformation results from the first stage. DR-Pose produces superior results to the state-of-the-art shape prior-based methods on both CAMERA25 and REAL275 benchmarks. Codes are available at https://github.com/Zray26/DR-Pose.git.
Variational Tracking and Redetection for Closely-spaced Objects in Heavy Clutter
Sep 04, 2023



The non-homogeneous Poisson process (NHPP) is a widely used measurement model that allows for an object to generate multiple measurements over time. However, it can be difficult to efficiently and reliably track multiple objects under this NHPP model in scenarios with a high density of closely-spaced objects and heavy clutter. Therefore, based on the general coordinate ascent variational filtering framework, this paper presents a variational Bayes association-based NHPP tracker (VB-AbNHPP) that can efficiently perform tracking, data association, and learning of target and clutter rates with a parallelisable implementation. In addition, a variational localisation strategy is proposed, which enables rapid rediscovery of missed targets from a large surveillance area under extremely heavy clutter. This strategy is integrated into the VB-AbNHPP tracker, resulting in a robust methodology that can automatically detect and recover from track loss. This tracker demonstrates improved tracking performance compared with existing trackers in challenging scenarios, in terms of both accuracy and efficiency.
Consensus-based Distributed Variational Multi-object Tracker in Multi-Sensor Network
Sep 02, 2023The growing need for accurate and reliable tracking systems has driven significant progress in sensor fusion and object tracking techniques. In this paper, we design two variational Bayesian trackers that effectively track multiple targets in cluttered environments within a sensor network. We first present a centralised sensor fusion scheme, which involves transmitting sensor data to a fusion center. Then, we develop a distributed version leveraging the average consensus algorithm, which is theoretically equivalent to the centralised sensor fusion tracker and requires only local message passing with neighbouring sensors. In addition, we empirically verify that our proposed distributed variational tracker performs on par with the centralised version with equal tracking accuracy. Simulation results show that our distributed multi-target tracker outperforms the suboptimal distributed sensor fusion strategy that fuses each sensor's posterior based on arithmetic sensor fusion and an average consensus strategy.