 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExternal Large Foundation Model: How to Efficiently Serve Trillions of Parameters for Online Ads Recommendation
Feb 26, 2025



Ads recommendation is a prominent service of online advertising systems and has been actively studied. Recent studies indicate that scaling-up and advanced design of the recommendation model can bring significant performance improvement. However, with a larger model scale, such prior studies have a significantly increasing gap from industry as they often neglect two fundamental challenges in industrial-scale applications. First, training and inference budgets are restricted for the model to be served, exceeding which may incur latency and impair user experience. Second, large-volume data arrive in a streaming mode with data distributions dynamically shifting, as new users/ads join and existing users/ads leave the system. We propose the External Large Foundation Model (ExFM) framework to address the overlooked challenges. Specifically, we develop external distillation and a data augmentation system (DAS) to control the computational cost of training/inference while maintaining high performance. We design the teacher in a way like a foundation model (FM) that can serve multiple students as vertical models (VMs) to amortize its building cost. We propose Auxiliary Head and Student Adapter to mitigate the data distribution gap between FM and VMs caused by the streaming data issue. Comprehensive experiments on internal industrial-scale applications and public datasets demonstrate significant performance gain by ExFM.
Unsupervised Nonlinear Spectral Unmixing based on a Multilinear Mixing Model
Apr 14, 2016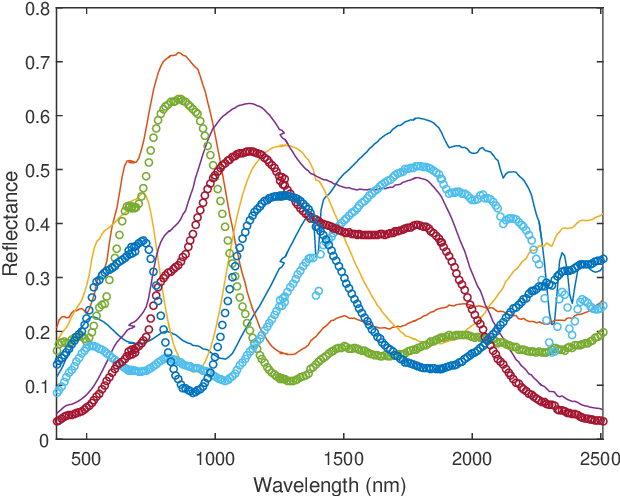
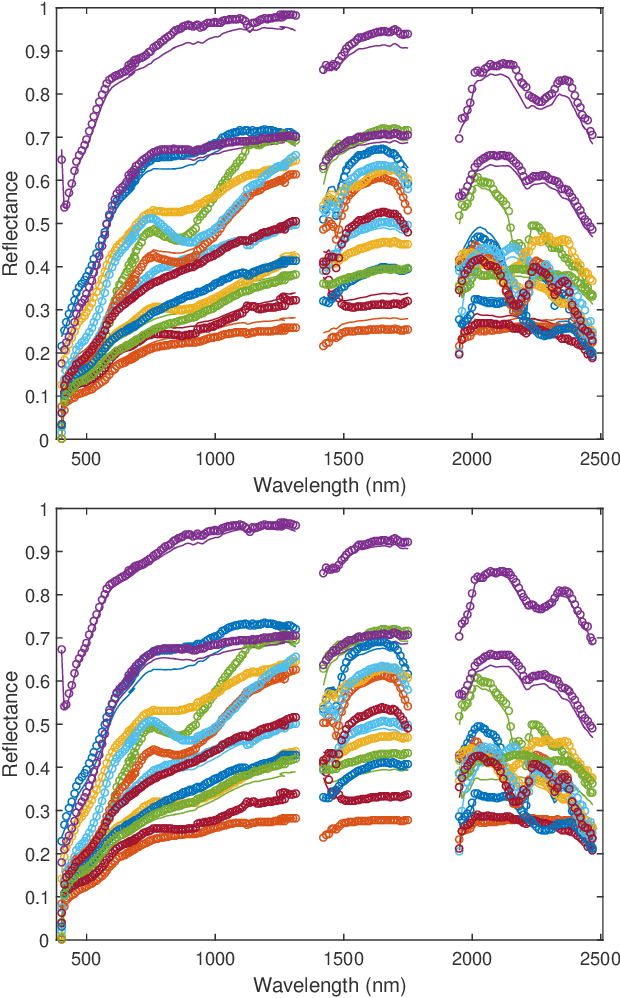
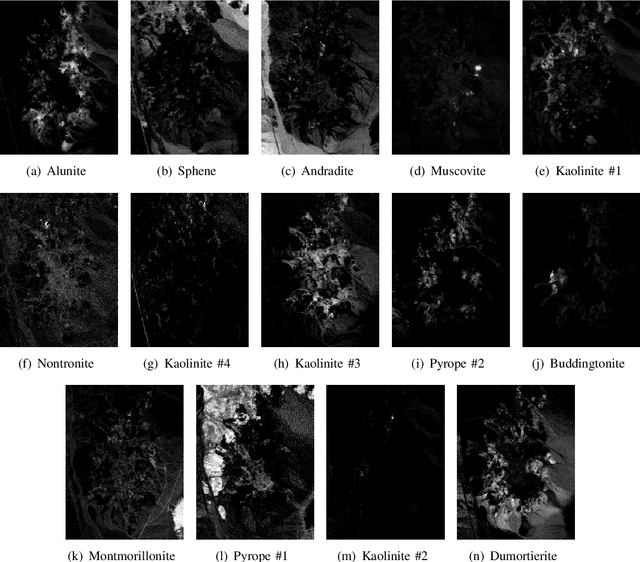
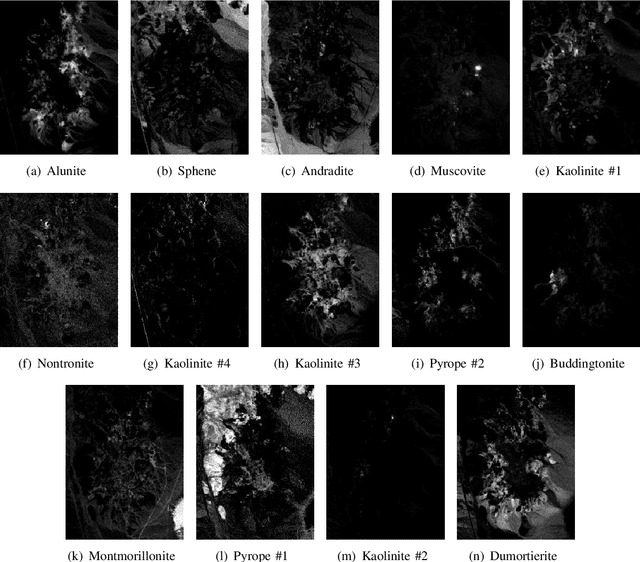
In the community of remote sensing, nonlinear mixing models have recently received particular attention in hyperspectral image processing. In this paper, we present a novel nonlinear spectral unmixing method following the recent multilinear mixing model of [1], which includes an infinite number of terms related to interactions between different endmembers. The proposed unmixing method is unsupervised in the sense that the endmembers are estimated jointly with the abundances and other parameters of interest, i.e., the transition probability of undergoing further interactions. Non-negativity and sum-to one constraints are imposed on abundances while only nonnegativity is considered for endmembers. The resulting unmixing problem is formulated as a constrained nonlinear optimization problem, which is solved by a block coordinate descent strategy, consisting of updating the endmembers, abundances and transition probability iteratively. The proposed method is evaluated and compared with linear unmixing methods for synthetic and real hyperspectral datasets acquired by the AVIRIS sensor. The advantage of using non-linear unmixing as opposed to linear unmixing is clearly shown in these examples.
Multi-Band Image Fusion Based on Spectral Unmixing
Mar 29, 2016
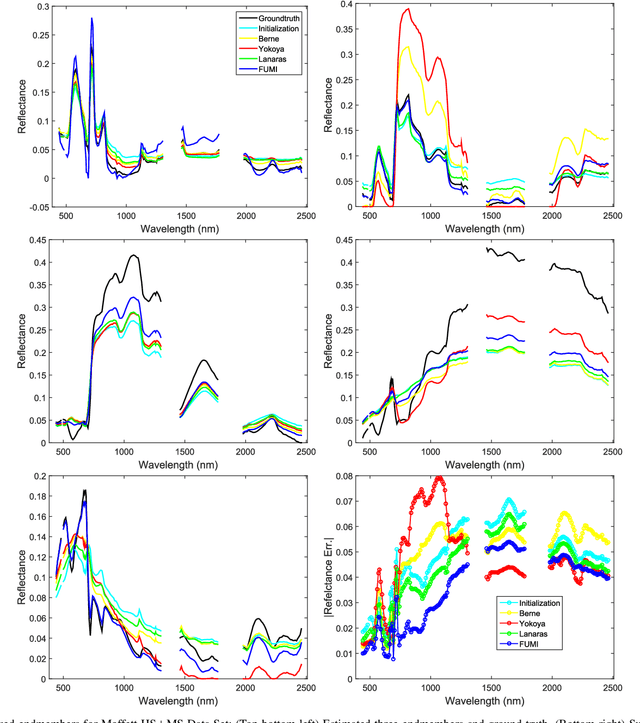
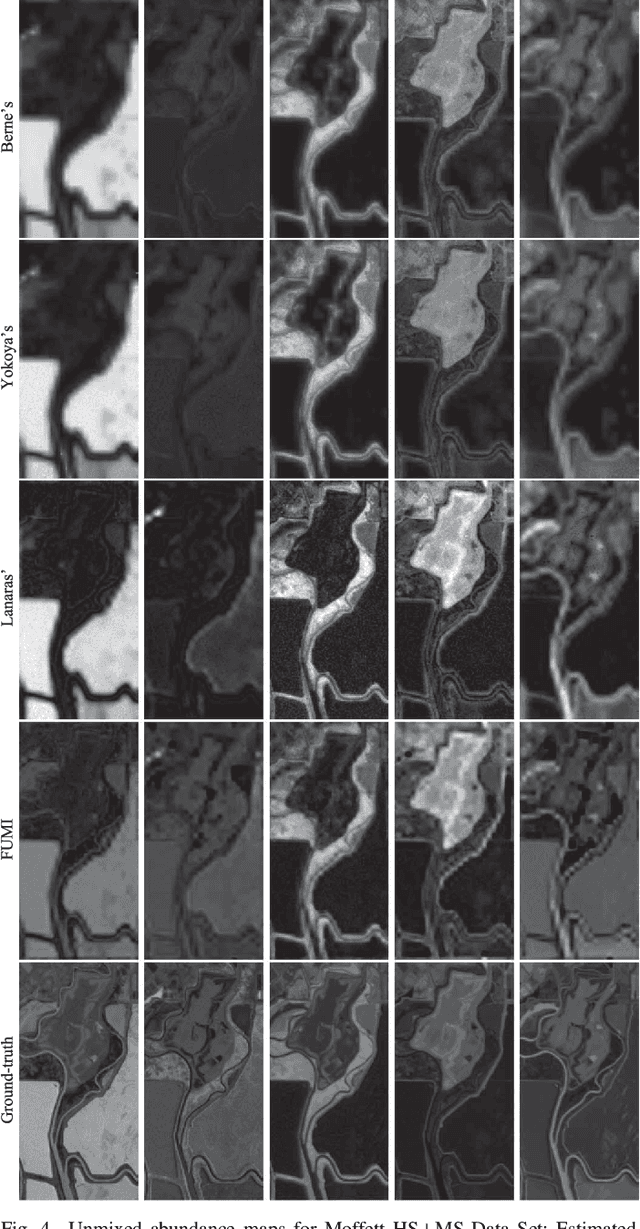
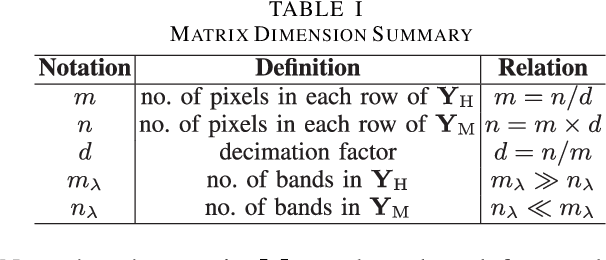
This paper presents a multi-band image fusion algorithm based on unsupervised spectral unmixing for combining a high-spatial low-spectral resolution image and a low-spatial high-spectral resolution image. The widely used linear observation model (with additive Gaussian noise) is combined with the linear spectral mixture model to form the likelihoods of the observations. The non-negativity and sum-to-one constraints resulting from the intrinsic physical properties of the abundances are introduced as prior information to regularize this ill-posed problem. The joint fusion and unmixing problem is then formulated as maximizing the joint posterior distribution with respect to the endmember signatures and abundance maps, This optimization problem is attacked with an alternating optimization strategy. The two resulting sub-problems are convex and are solved efficiently using the alternating direction method of multipliers. Experiments are conducted for both synthetic and semi-real data. Simulation results show that the proposed unmixing based fusion scheme improves both the abundance and endmember estimation comparing with the state-of-the-art joint fusion and unmixing algorithms.
A Diffusion Process on Riemannian Manifold for Visual Tracking
Mar 24, 2013

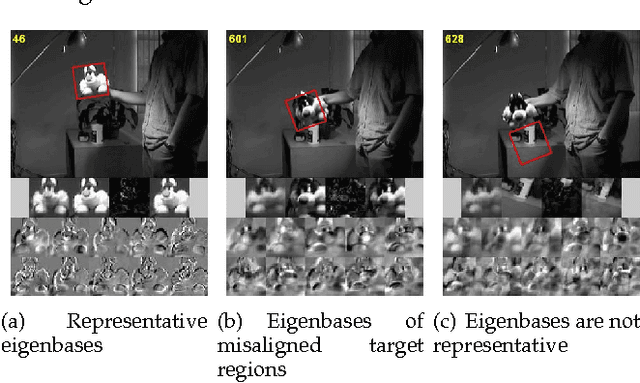
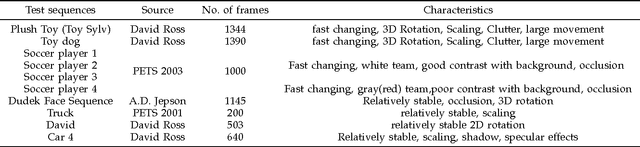
Robust visual tracking for long video sequences is a research area that has many important applications. The main challenges include how the target image can be modeled and how this model can be updated. In this paper, we model the target using a covariance descriptor, as this descriptor is robust to problems such as pixel-pixel misalignment, pose and illumination changes, that commonly occur in visual tracking. We model the changes in the template using a generative process. We introduce a new dynamical model for the template update using a random walk on the Riemannian manifold where the covariance descriptors lie in. This is done using log-transformed space of the manifold to free the constraints imposed inherently by positive semidefinite matrices. Modeling template variations and poses kinetics together in the state space enables us to jointly quantify the uncertainties relating to the kinematic states and the template in a principled way. Finally, the sequential inference of the posterior distribution of the kinematic states and the template is done using a particle filter. Our results shows that this principled approach can be robust to changes in illumination, poses and spatial affine transformation. In the experiments, our method outperformed the current state-of-the-art algorithm - the incremental Principal Component Analysis method, particularly when a target underwent fast poses changes and also maintained a comparable performance in stable target tracking cases.