 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrowing Fast without Colliding: Polylogarithmic Time Step Construction of Geometric Shapes
Jul 10, 2023Building on two recent models of [Almalki and Michail, 2022] and [Gupta et al., 2023], we explore the constructive power of a set of geometric growth processes. The studied processes, by applying a sequence of centralized, parallel, and linear-strength growth operations, can construct shapes from smaller shapes or from a singleton exponentially fast. A technical challenge in growing shapes that fast is the need to avoid collisions caused, for example, when the shape breaks, stretches, or self-intersects. We distinguish two types of growth operations -- one that avoids collisions by preserving cycles and one that achieves the same by breaking them -- and two types of graph models. We study the following types of shape reachability questions in these models. Given a class of initial shapes $\mathcal{I}$ and a class of final shapes $\mathcal{F}$, our objective is to determine whether any (some) shape $S \in \mathcal{F}$ can be reached from any shape $S_0 \in \mathcal{I}$ in a number of time steps which is (poly)logarithmic in the size of $S$. For the reachable classes, we additionally present the respective growth processes. In cycle-preserving growth, we study these problems in basic classes of shapes such as paths, spirals, and trees and reveal the importance of the number of turning points as a parameter. We give both positive and negative results. For cycle-breaking growth, we obtain a strong positive result -- a general growth process that can grow any connected shape from a singleton fast.
Collision Detection for Modular Robots -- it is easy to cause collisions and hard to avoid them
May 01, 2023We consider geometric collision-detection problems for modular reconfigurable robots. Assuming the nodes (modules) are connected squares on a grid, we investigate the complexity of deciding whether collisions may occur, or can be avoided, if a set of expansion and contraction operations is executed. We study both discrete- and continuous-time models, and allow operations to be coupled into a single parallel group. Our algorithms to decide if a collision may occur run in $O(n^2\log^2 n)$ time, $O(n^2)$ time, or $O(n\log^2 n)$ time, depending on the presence and type of coupled operations, in a continuous-time model for a modular robot with $n$ nodes. To decide if collisions can be avoided, we show that a very restricted version is already NP-complete in the discrete-time model, while the same problem is polynomial in the continuous-time model. A less restricted version is NP-hard in the continuous-time model.
1st Workshop on Maritime Computer Vision 2023: Challenge Results
Nov 28, 2022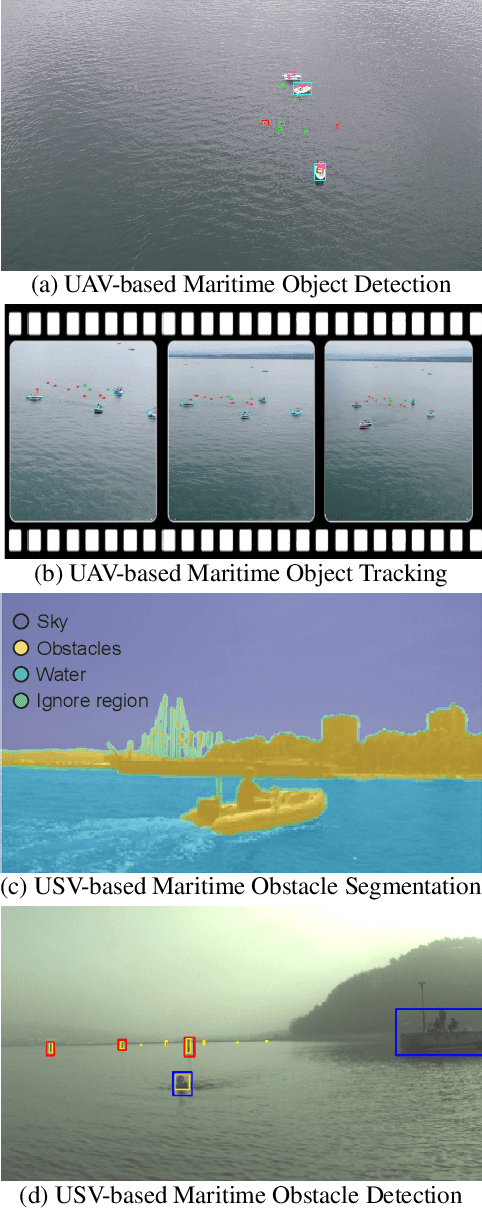
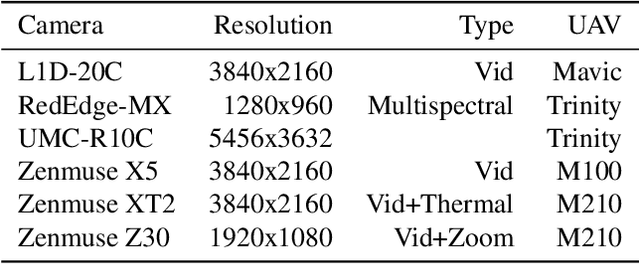
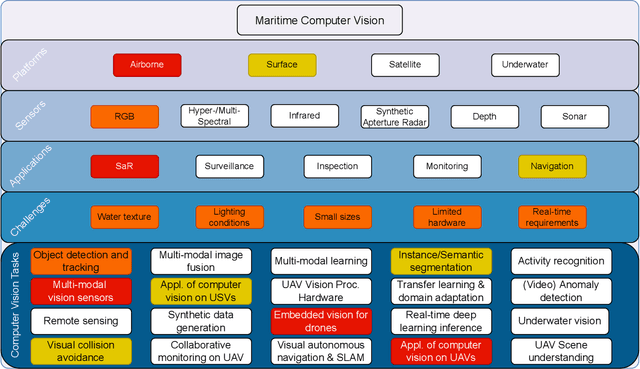
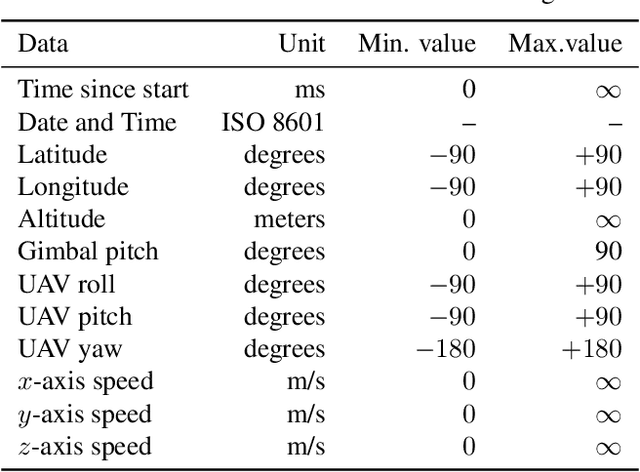
The 1$^{\text{st}}$ Workshop on Maritime Computer Vision (MaCVi) 2023 focused on maritime computer vision for Unmanned Aerial Vehicles (UAV) and Unmanned Surface Vehicle (USV), and organized several subchallenges in this domain: (i) UAV-based Maritime Object Detection, (ii) UAV-based Maritime Object Tracking, (iii) USV-based Maritime Obstacle Segmentation and (iv) USV-based Maritime Obstacle Detection. The subchallenges were based on the SeaDronesSee and MODS benchmarks. This report summarizes the main findings of the individual subchallenges and introduces a new benchmark, called SeaDronesSee Object Detection v2, which extends the previous benchmark by including more classes and footage. We provide statistical and qualitative analyses, and assess trends in the best-performing methodologies of over 130 submissions. The methods are summarized in the appendix. The datasets, evaluation code and the leaderboard are publicly available at https://seadronessee.cs.uni-tuebingen.de/macvi.
Detecting Urban Changes with Recurrent Neural Networks from Multitemporal Sentinel-2 Data
Oct 17, 2019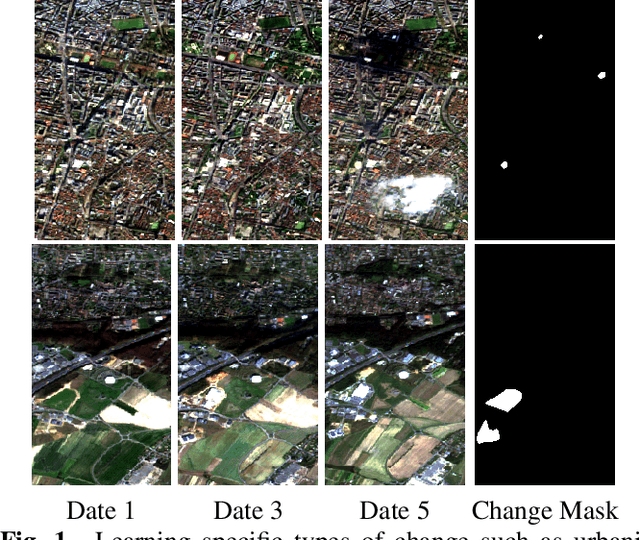

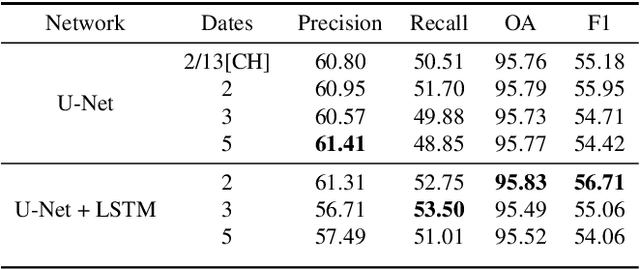
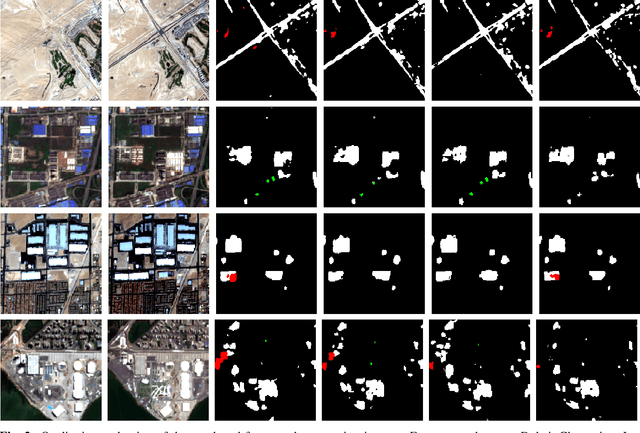
\begin{abstract} The advent of multitemporal high resolution data, like the Copernicus Sentinel-2, has enhanced significantly the potential of monitoring the earth's surface and environmental dynamics. In this paper, we present a novel deep learning framework for urban change detection which combines state-of-the-art fully convolutional networks (similar to U-Net) for feature representation and powerful recurrent networks (such as LSTMs) for temporal modeling. We report our results on the recently publicly available bi-temporal Onera Satellite Change Detection (OSCD) Sentinel-2 dataset, enhancing the temporal information with additional images of the same region on different dates. Moreover, we evaluate the performance of the recurrent networks as well as the use of the additional dates on the unseen test-set using an ensemble cross-validation strategy. All the developed models during the validation phase have scored an overall accuracy of more than 95%, while the use of LSTMs and further temporal information, boost the F1 rate of the change class by an additional 1.5%.
A New Parallel Algorithm for Two-Pass Connected Component Labeling
Jun 20, 2016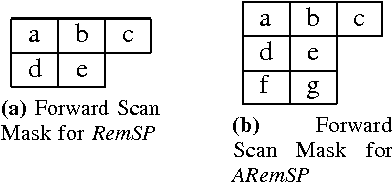
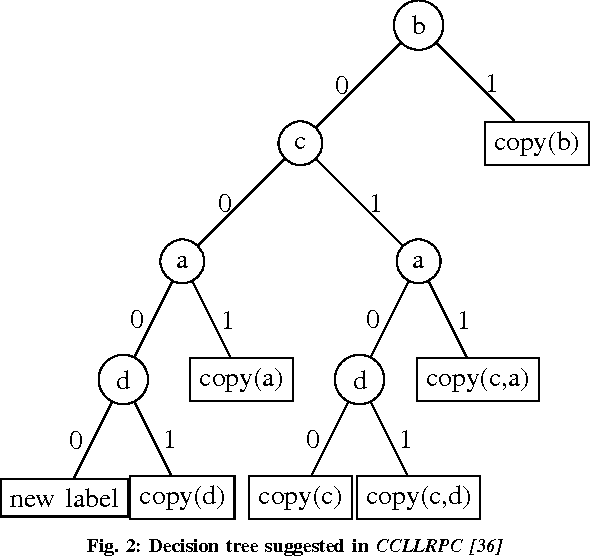
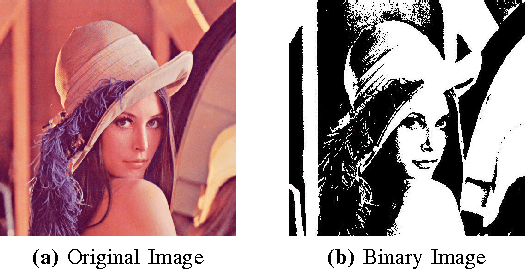
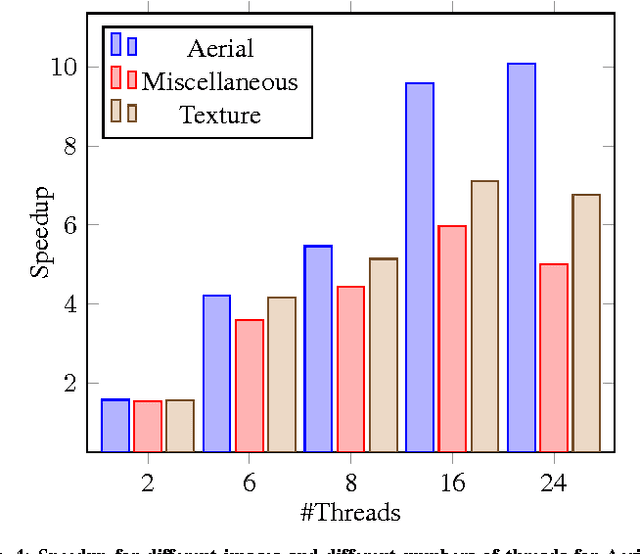
Connected Component Labeling (CCL) is an important step in pattern recognition and image processing. It assigns labels to the pixels such that adjacent pixels sharing the same features are assigned the same label. Typically, CCL requires several passes over the data. We focus on two-pass technique where each pixel is given a provisional label in the first pass whereas an actual label is assigned in the second pass. We present a scalable parallel two-pass CCL algorithm, called PAREMSP, which employs a scan strategy and the best union-find technique called REMSP, which uses REM's algorithm for storing label equivalence information of pixels in a 2-D image. In the first pass, we divide the image among threads and each thread runs the scan phase along with REMSP simultaneously. In the second phase, we assign the final labels to the pixels. As REMSP is easily parallelizable, we use the parallel version of REMSP for merging the pixels on the boundary. Our experiments show the scalability of PAREMSP achieving speedups up to $20.1$ using $24$ cores on shared memory architecture using OpenMP for an image of size $465.20$ MB. We find that our proposed parallel algorithm achieves linear scaling for a large resolution fixed problem size as the number of processing elements are increased. Additionally, the parallel algorithm does not make use of any hardware specific routines, and thus is highly portable.