 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthForge: Synthesizing High-Quality Face Dataset with Controllable 3D Generative Models
Jun 12, 2024



Recent advancements in generative models have unlocked the capabilities to render photo-realistic data in a controllable fashion. Trained on the real data, these generative models are capable of producing realistic samples with minimal to no domain gap, as compared to the traditional graphics rendering. However, using the data generated using such models for training downstream tasks remains under-explored, mainly due to the lack of 3D consistent annotations. Moreover, controllable generative models are learned from massive data and their latent space is often too vast to obtain meaningful sample distributions for downstream task with limited generation. To overcome these challenges, we extract 3D consistent annotations from an existing controllable generative model, making the data useful for downstream tasks. Our experiments show competitive performance against state-of-the-art models using only generated synthetic data, demonstrating potential for solving downstream tasks. Project page: https://synth-forge.github.io
IDD-3D: Indian Driving Dataset for 3D Unstructured Road Scenes
Oct 23, 2022Autonomous driving and assistance systems rely on annotated data from traffic and road scenarios to model and learn the various object relations in complex real-world scenarios. Preparation and training of deploy-able deep learning architectures require the models to be suited to different traffic scenarios and adapt to different situations. Currently, existing datasets, while large-scale, lack such diversities and are geographically biased towards mainly developed cities. An unstructured and complex driving layout found in several developing countries such as India poses a challenge to these models due to the sheer degree of variations in the object types, densities, and locations. To facilitate better research toward accommodating such scenarios, we build a new dataset, IDD-3D, which consists of multi-modal data from multiple cameras and LiDAR sensors with 12k annotated driving LiDAR frames across various traffic scenarios. We discuss the need for this dataset through statistical comparisons with existing datasets and highlight benchmarks on standard 3D object detection and tracking tasks in complex layouts. Code and data available at https://github.com/shubham1810/idd3d_kit.git
TRoVE: Transforming Road Scene Datasets into Photorealistic Virtual Environments
Aug 16, 2022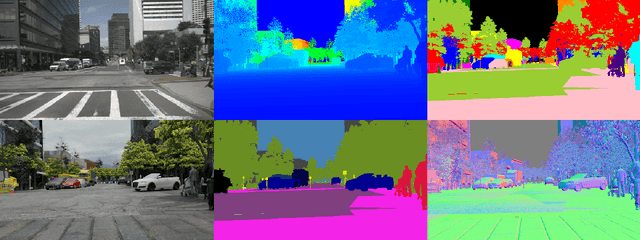

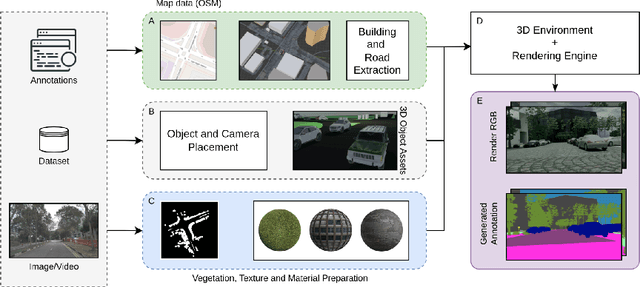
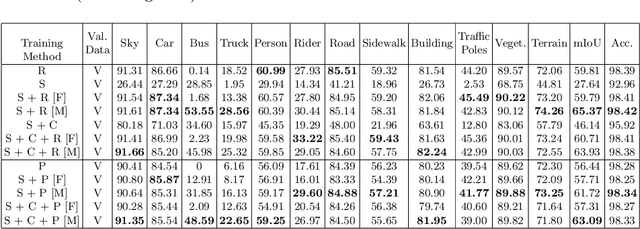
High-quality structured data with rich annotations are critical components in intelligent vehicle systems dealing with road scenes. However, data curation and annotation require intensive investments and yield low-diversity scenarios. The recently growing interest in synthetic data raises questions about the scope of improvement in such systems and the amount of manual work still required to produce high volumes and variations of simulated data. This work proposes a synthetic data generation pipeline that utilizes existing datasets, like nuScenes, to address the difficulties and domain-gaps present in simulated datasets. We show that using annotations and visual cues from existing datasets, we can facilitate automated multi-modal data generation, mimicking real scene properties with high-fidelity, along with mechanisms to diversify samples in a physically meaningful way. We demonstrate improvements in mIoU metrics by presenting qualitative and quantitative experiments with real and synthetic data for semantic segmentation on the Cityscapes and KITTI-STEP datasets. All relevant code and data is released on github (https://github.com/shubham1810/trove_toolkit).
Graph Representation learning for Audio & Music genre Classification
Oct 23, 2019Music genre is arguably one of the most important and discriminative information for music and audio content. Visual representation based approaches have been explored on spectrograms for music genre classification. However, lack of quality data and augmentation techniques makes it difficult to employ deep learning techniques successfully. We discuss the application of graph neural networks on such task due to their strong inductive bias, and show that combination of CNN and GNN is able to achieve state-of-the-art results on GTZAN, and AudioSet (Imbalanced Music) datasets. We also discuss the role of Siamese Neural Networks as an analogous to GNN for learning edge similarity weights. Furthermore, we also perform visual analysis to understand the field-of-view of our model into the spectrogram based on genre labels.
Opportunistic Self Organizing Migrating Algorithm for Real-Time Dynamic Traveling Salesman Problem
Sep 12, 2017
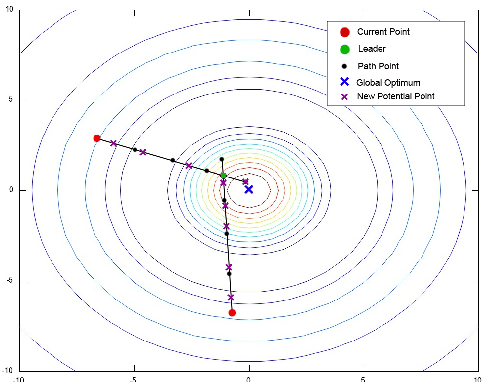
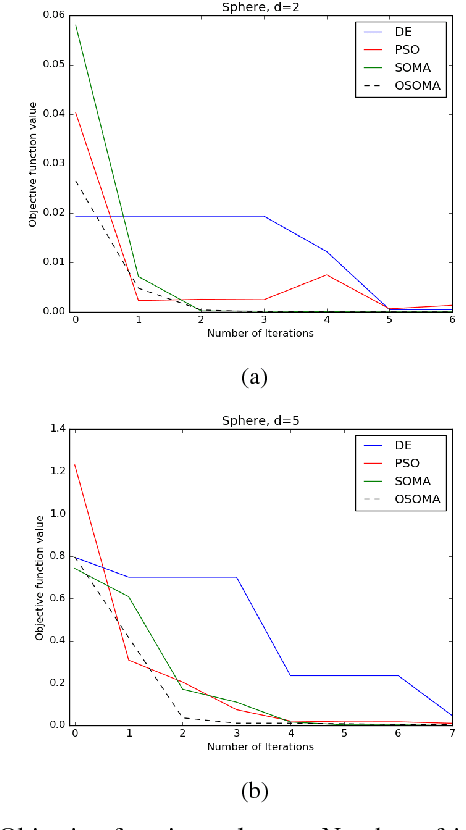
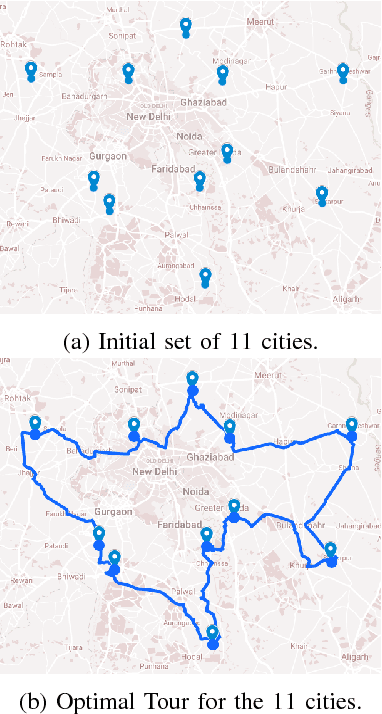
Self Organizing Migrating Algorithm (SOMA) is a meta-heuristic algorithm based on the self-organizing behavior of individuals in a simulated social environment. SOMA performs iterative computations on a population of potential solutions in the given search space to obtain an optimal solution. In this paper, an Opportunistic Self Organizing Migrating Algorithm (OSOMA) has been proposed that introduces a novel strategy to generate perturbations effectively. This strategy allows the individual to span across more possible solutions and thus, is able to produce better solutions. A comprehensive analysis of OSOMA on multi-dimensional unconstrained benchmark test functions is performed. OSOMA is then applied to solve real-time Dynamic Traveling Salesman Problem (DTSP). The problem of real-time DTSP has been stipulated and simulated using real-time data from Google Maps with a varying cost-metric between any two cities. Although DTSP is a very common and intuitive model in the real world, its presence in literature is still very limited. OSOMA performs exceptionally well on the problems mentioned above. To substantiate this claim, the performance of OSOMA is compared with SOMA, Differential Evolution and Particle Swarm Optimization.
Hierarchy Influenced Differential Evolution: A Motor Operation Inspired Approach
Sep 12, 2017
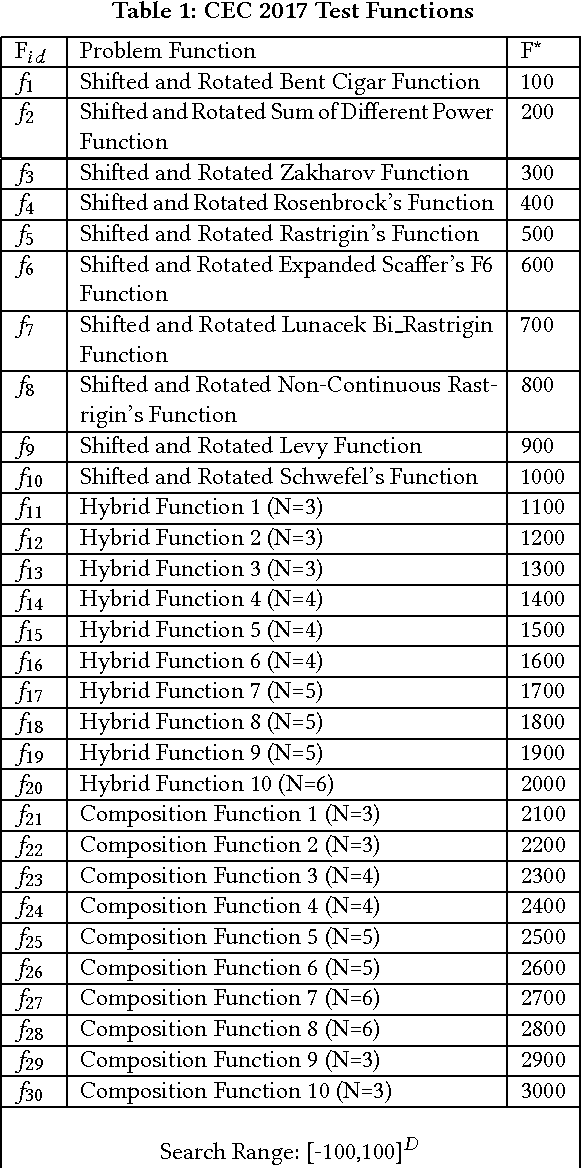


Operational maturity of biological control systems have fuelled the inspiration for a large number of mathematical and logical models for control, automation and optimisation. The human brain represents the most sophisticated control architecture known to us and is a central motivation for several research attempts across various domains. In the present work, we introduce an algorithm for mathematical optimisation that derives its intuition from the hierarchical and distributed operations of the human motor system. The system comprises global leaders, local leaders and an effector population that adapt dynamically to attain global optimisation via a feedback mechanism coupled with the structural hierarchy. The hierarchical system operation is distributed into local control for movement and global controllers that facilitate gross motion and decision making. We present our algorithm as a variant of the classical Differential Evolution algorithm, introducing a hierarchical crossover operation. The discussed approach is tested exhaustively on standard test functions as well as the CEC 2017 benchmark. Our algorithm significantly outperforms various standard algorithms as well as their popular variants as discussed in the results.