 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Robot System for Cooperative Exploration in Unknown Environments: A Survey
Mar 10, 2025With the advancement of multi-robot technology, cooperative exploration tasks have garnered increasing attention. This paper presents a comprehensive review of multi-robot cooperative exploration systems. First, we review the evolution of robotic exploration and introduce a modular research framework tailored for multi-robot cooperative exploration. Based on this framework, we systematically categorize and summarize key system components. As a foundational module for multi-robot exploration, the localization and mapping module is primarily introduced by focusing on global and relative pose estimation, as well as multi-robot map merging techniques. The cooperative motion module is further divided into learning-based approaches and multi-stage planning, with the latter encompassing target generation, task allocation, and motion planning strategies. Given the communication constraints of real-world environments, we also analyze the communication module, emphasizing how robots exchange information within local communication ranges and under limited transmission capabilities. Finally, we discuss the challenges and future research directions for multi-robot cooperative exploration in light of real-world trends. This review aims to serve as a valuable reference for researchers and practitioners in the field.
What Matters in Learning A Zero-Shot Sim-to-Real RL Policy for Quadrotor Control? A Comprehensive Study
Dec 17, 2024Executing precise and agile flight maneuvers is critical for quadrotors in various applications. Traditional quadrotor control approaches are limited by their reliance on flat trajectories or time-consuming optimization, which restricts their flexibility. Recently, RL-based policy has emerged as a promising alternative due to its ability to directly map observations to actions, reducing the need for detailed system knowledge and actuation constraints. However, a significant challenge remains in bridging the sim-to-real gap, where RL-based policies often experience instability when deployed in real world. In this paper, we investigate key factors for learning robust RL-based control policies that are capable of zero-shot deployment in real-world quadrotors. We identify five critical factors and we develop a PPO-based training framework named SimpleFlight, which integrates these five techniques. We validate the efficacy of SimpleFlight on Crazyflie quadrotor, demonstrating that it achieves more than a 50% reduction in trajectory tracking error compared to state-of-the-art RL baselines, and achieves 70% improvement over the traditional MPC. The policy derived by SimpleFlight consistently excels across both smooth polynominal trajectories and challenging infeasible zigzag trajectories on small thrust-to-weight quadrotors. In contrast, baseline methods struggle with high-speed or infeasible trajectories. To support further research and reproducibility, we integrate SimpleFlight into a GPU-based simulator Omnidrones and provide open-source access to the code and model checkpoints. We hope SimpleFlight will offer valuable insights for advancing RL-based quadrotor control. For more details, visit our project website at https://sites.google.com/view/simpleflight/.
Localization matters too: How localization error affects UAV flight
Mar 07, 2024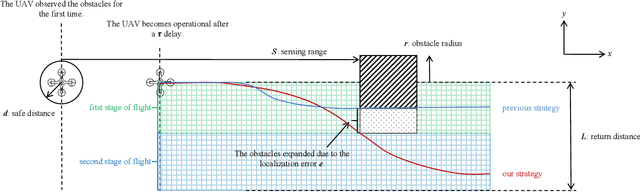
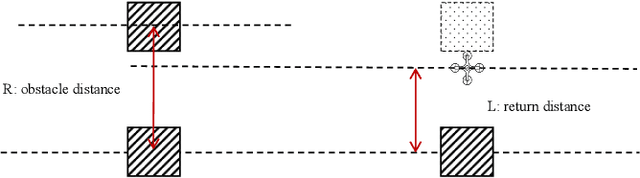
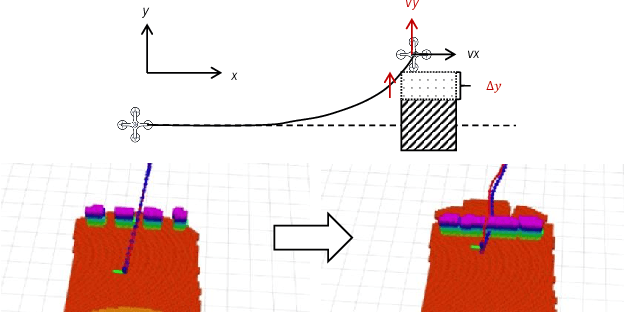
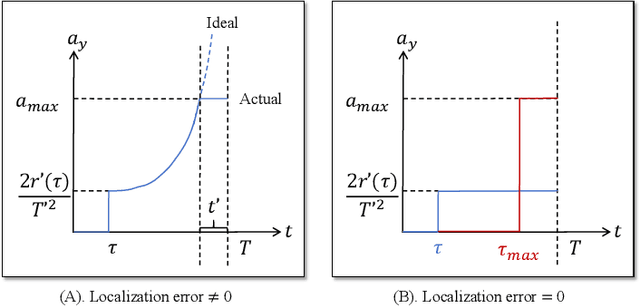
The maximum safe flight speed of a Unmanned Aerial Vehicle (UAV) is an important indicator for measuring its efficiency in completing various tasks. This indicator is influenced by numerous parameters such as UAV localization error, perception range, and system latency. However, in terms of localization errors, although there have been many studies dedicated to improving the localization capability of UAVs, there is a lack of quantitative research on their impact on speed. In this work, we model the relationship between various parameters of the UAV and its maximum flight speed. We consider a scenario similar to navigating through dense forests, where the UAV needs to quickly avoid obstacles directly ahead and swiftly reorient after avoidance. Based on this scenario, we studied how parameters such as localization error affect the maximum safe speed during UAV flight, as well as the coupling relationships between these parameters. Furthermore, we validated our model in a simulation environment, and the results showed that the predicted maximum safe speed had an error of less than 20% compared to the test speed. In high-density situations, localization error has a significant impact on the UAV's maximum safe flight speed. This model can help designers utilize more suitable software and hardware to construct a UAV system.