 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSayAnything: Audio-Driven Lip Synchronization with Conditional Video Diffusion
Feb 17, 2025
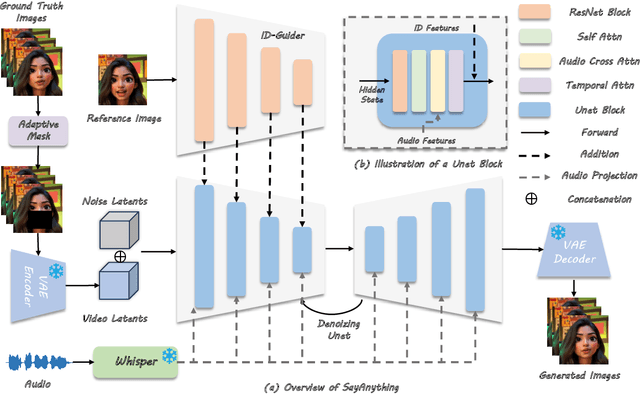
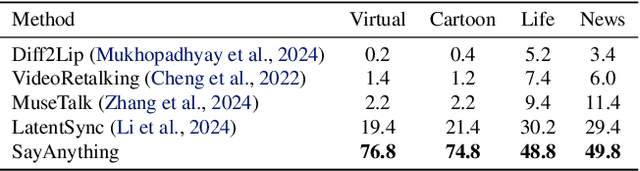
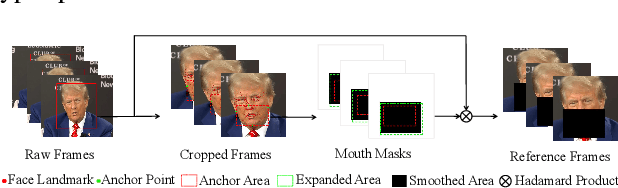
Recent advances in diffusion models have led to significant progress in audio-driven lip synchronization. However, existing methods typically rely on constrained audio-visual alignment priors or multi-stage learning of intermediate representations to force lip motion synthesis. This leads to complex training pipelines and limited motion naturalness. In this paper, we present SayAnything, a conditional video diffusion framework that directly synthesizes lip movements from audio input while preserving speaker identity. Specifically, we propose three specialized modules including identity preservation module, audio guidance module, and editing control module. Our novel design effectively balances different condition signals in the latent space, enabling precise control over appearance, motion, and region-specific generation without requiring additional supervision signals or intermediate representations. Extensive experiments demonstrate that SayAnything generates highly realistic videos with improved lip-teeth coherence, enabling unseen characters to say anything, while effectively generalizing to animated characters.
PowerMLP: An Efficient Version of KAN
Dec 18, 2024The Kolmogorov-Arnold Network (KAN) is a new network architecture known for its high accuracy in several tasks such as function fitting and PDE solving. The superior expressive capability of KAN arises from the Kolmogorov-Arnold representation theorem and learnable spline functions. However, the computation of spline functions involves multiple iterations, which renders KAN significantly slower than MLP, thereby increasing the cost associated with model training and deployment. The authors of KAN have also noted that ``the biggest bottleneck of KANs lies in its slow training. KANs are usually 10x slower than MLPs, given the same number of parameters.'' To address this issue, we propose a novel MLP-type neural network PowerMLP that employs simpler non-iterative spline function representation, offering approximately the same training time as MLP while theoretically demonstrating stronger expressive power than KAN. Furthermore, we compare the FLOPs of KAN and PowerMLP, quantifying the faster computation speed of PowerMLP. Our comprehensive experiments demonstrate that PowerMLP generally achieves higher accuracy and a training speed about 40 times faster than KAN in various tasks.
RIs-Calib: An Open-Source Spatiotemporal Calibrator for Multiple 3D Radars and IMUs Based on Continuous-Time Estimation
Aug 05, 2024


Aided inertial navigation system (INS), typically consisting of an inertial measurement unit (IMU) and an exteroceptive sensor, has been widely accepted as a feasible solution for navigation. Compared with vision-aided and LiDAR-aided INS, radar-aided INS could achieve better performance in adverse weather conditions since the radar utilizes low-frequency measuring signals with less attenuation effect in atmospheric gases and rain. For such a radar-aided INS, accurate spatiotemporal transformation is a fundamental prerequisite to achieving optimal information fusion. In this work, we present RIs-Calib: a spatiotemporal calibrator for multiple 3D radars and IMUs based on continuous-time estimation, which enables accurate spatiotemporal calibration and does not require any additional artificial infrastructure or prior knowledge. Our approach starts with a rigorous and robust procedure for state initialization, followed by batch optimizations, where all parameters can be refined to global optimal states steadily. We validate and evaluate RIs-Calib on both simulated and real-world experiments, and the results demonstrate that RIs-Calib is capable of accurate and consistent calibration. We open-source our implementations at (https://github.com/Unsigned-Long/RIs-Calib) to benefit the research community.