 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeeKalibr-Stereo: Continuous-Time Spatiotemporal Calibration for Event-Based Stereo Visual Systems
Apr 06, 2025



The bioinspired event camera, distinguished by its exceptional temporal resolution, high dynamic range, and low power consumption, has been extensively studied in recent years for motion estimation, robotic perception, and object detection. In ego-motion estimation, the stereo event camera setup is commonly adopted due to its direct scale perception and depth recovery. For optimal stereo visual fusion, accurate spatiotemporal (extrinsic and temporal) calibration is required. Considering that few stereo visual calibrators orienting to event cameras exist, based on our previous work eKalibr (an event camera intrinsic calibrator), we propose eKalibr-Stereo for accurate spatiotemporal calibration of event-based stereo visual systems. To improve the continuity of grid pattern tracking, building upon the grid pattern recognition method in eKalibr, an additional motion prior-based tracking module is designed in eKalibr-Stereo to track incomplete grid patterns. Based on tracked grid patterns, a two-step initialization procedure is performed to recover initial guesses of piece-wise B-splines and spatiotemporal parameters, followed by a continuous-time batch bundle adjustment to refine the initialized states to optimal ones. The results of extensive real-world experiments show that eKalibr-Stereo can achieve accurate event-based stereo spatiotemporal calibration. The implementation of eKalibr-Stereo is open-sourced at (https://github.com/Unsigned-Long/eKalibr) to benefit the research community.
eKalibr: Dynamic Intrinsic Calibration for Event Cameras From First Principles of Events
Jan 10, 2025



The bio-inspired event camera has garnered extensive research attention in recent years, owing to its significant potential derived from its high dynamic range and low latency characteristics. Similar to the standard camera, the event camera requires precise intrinsic calibration to facilitate further high-level visual applications, such as pose estimation and mapping. While several calibration methods for event cameras have been proposed, most of them are either (i) engineering-driven, heavily relying on conventional image-based calibration pipelines, or (ii) inconvenient, requiring complex instrumentation. To this end, we propose an accurate and convenient intrinsic calibration method for event cameras, named eKalibr, which builds upon a carefully designed event-based circle grid pattern recognition algorithm. To extract target patterns from events, we perform event-based normal flow estimation to identify potential events generated by circle edges, and cluster them spatially. Subsequently, event clusters associated with the same grid circles are matched and grouped using normal flows, for subsequent time-varying ellipse estimation. Fitted ellipse centers are time-synchronized, for final grid pattern recognition. We conducted extensive experiments to evaluate the performance of eKalibr in terms of pattern extraction and intrinsic calibration. The implementation of eKalibr is open-sourced at (https://github.com/Unsigned-Long/eKalibr) to benefit the research community.
iKalibr-RGBD: Partially-Specialized Target-Free Visual-Inertial Spatiotemporal Calibration For RGBDs via Continuous-Time Velocity Estimation
Sep 11, 2024



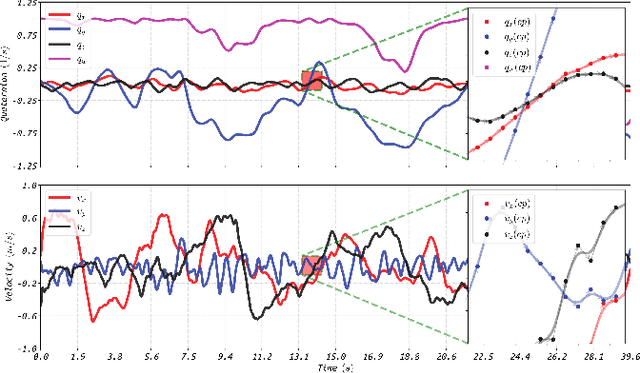
Visual-inertial systems have been widely studied and applied in the last two decades, mainly due to their low cost and power consumption, small footprint, and high availability. Such a trend simultaneously leads to a large amount of visual-inertial calibration methods being presented, as accurate spatiotemporal parameters between sensors are a prerequisite for visual-inertial fusion. In our previous work, i.e., iKalibr, a continuous-time-based visual-inertial calibration method was proposed as a part of one-shot multi-sensor resilient spatiotemporal calibration. While requiring no artificial target brings considerable convenience, computationally expensive pose estimation is demanded in initialization and batch optimization, limiting its availability. Fortunately, this could be vastly improved for the RGBDs with additional depth information, by employing mapping-free ego-velocity estimation instead of mapping-based pose estimation. In this paper, we present the continuous-time ego-velocity estimation-based RGBD-inertial spatiotemporal calibration, termed as iKalibr-RGBD, which is also targetless but computationally efficient. The general pipeline of iKalibr-RGBD is inherited from iKalibr, composed of a rigorous initialization procedure and several continuous-time batch optimizations. The implementation of iKalibr-RGBD is open-sourced at (https://github.com/Unsigned-Long/iKalibr) to benefit the research community.
RIs-Calib: An Open-Source Spatiotemporal Calibrator for Multiple 3D Radars and IMUs Based on Continuous-Time Estimation
Aug 05, 2024


Aided inertial navigation system (INS), typically consisting of an inertial measurement unit (IMU) and an exteroceptive sensor, has been widely accepted as a feasible solution for navigation. Compared with vision-aided and LiDAR-aided INS, radar-aided INS could achieve better performance in adverse weather conditions since the radar utilizes low-frequency measuring signals with less attenuation effect in atmospheric gases and rain. For such a radar-aided INS, accurate spatiotemporal transformation is a fundamental prerequisite to achieving optimal information fusion. In this work, we present RIs-Calib: a spatiotemporal calibrator for multiple 3D radars and IMUs based on continuous-time estimation, which enables accurate spatiotemporal calibration and does not require any additional artificial infrastructure or prior knowledge. Our approach starts with a rigorous and robust procedure for state initialization, followed by batch optimizations, where all parameters can be refined to global optimal states steadily. We validate and evaluate RIs-Calib on both simulated and real-world experiments, and the results demonstrate that RIs-Calib is capable of accurate and consistent calibration. We open-source our implementations at (https://github.com/Unsigned-Long/RIs-Calib) to benefit the research community.
iKalibr: Unified Targetless Spatiotemporal Calibration for Resilient Integrated Inertial Systems
Jul 16, 2024



The integrated inertial system, typically integrating an IMU and an exteroceptive sensor such as radar, LiDAR, and camera, has been widely accepted and applied in modern robotic applications for ego-motion estimation, motion control, or autonomous exploration. To improve system accuracy, robustness, and further usability, both multiple and various sensors are generally resiliently integrated, which benefits the system performance regarding failure tolerance, perception capability, and environment compatibility. For such systems, accurate and consistent spatiotemporal calibration is required to maintain a unique spatiotemporal framework for multi-sensor fusion. Considering most existing calibration methods (i) are generally oriented to specific integrated inertial systems, (ii) often only focus on spatial determination, (iii) usually require artificial targets, lacking convenience and usability, we propose iKalibr: a unified targetless spatiotemporal calibration framework for resilient integrated inertial systems, which overcomes the above issues, and enables both accurate and consistent calibration. Altogether four commonly employed sensors are supported in iKalibr currently, namely IMU, radar, LiDAR, and camera. The proposed method starts with a rigorous and efficient dynamic initialization, where all parameters in the estimator would be accurately recovered. Following that, several continuous-time-based batch optimizations would be carried out to refine initialized parameters to global optimal ones. Sufficient real-world experiments were conducted to verify the feasibility and evaluate the calibration performance of iKalibr. The results demonstrate that iKalibr can achieve accurate resilient spatiotemporal calibration. We open-source our implementations at (https://github.com/Unsigned-Long/iKalibr) to benefit the research community.