 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRevisiting 3D Reconstruction Kernels as Low-Pass Filters
Jan 25, 20263D reconstruction is to recover 3D signals from the sampled discrete 2D pixels, with the goal to converge continuous 3D spaces. In this paper, we revisit 3D reconstruction from the perspective of signal processing, identifying the periodic spectral extension induced by discrete sampling as the fundamental challenge. Previous 3D reconstruction kernels, such as Gaussians, Exponential functions, and Student's t distributions, serve as the low pass filters to isolate the baseband spectrum. However, their unideal low-pass property results in the overlap of high-frequency components with low-frequency components in the discrete-time signal's spectrum. To this end, we introduce Jinc kernel with an instantaneous drop to zero magnitude exactly at the cutoff frequency, which is corresponding to the ideal low pass filters. As Jinc kernel suffers from low decay speed in the spatial domain, we further propose modulated kernels to strick an effective balance, and achieves superior rendering performance by reconciling spatial efficiency and frequency-domain fidelity. Experimental results have demonstrated the effectiveness of our Jinc and modulated kernels.
E-GRPO: High Entropy Steps Drive Effective Reinforcement Learning for Flow Models
Jan 01, 2026Recent reinforcement learning has enhanced the flow matching models on human preference alignment. While stochastic sampling enables the exploration of denoising directions, existing methods which optimize over multiple denoising steps suffer from sparse and ambiguous reward signals. We observe that the high entropy steps enable more efficient and effective exploration while the low entropy steps result in undistinguished roll-outs. To this end, we propose E-GRPO, an entropy aware Group Relative Policy Optimization to increase the entropy of SDE sampling steps. Since the integration of stochastic differential equations suffer from ambiguous reward signals due to stochasticity from multiple steps, we specifically merge consecutive low entropy steps to formulate one high entropy step for SDE sampling, while applying ODE sampling on other steps. Building upon this, we introduce multi-step group normalized advantage, which computes group-relative advantages within samples sharing the same consolidated SDE denoising step. Experimental results on different reward settings have demonstrated the effectiveness of our methods.
Scene Splatter: Momentum 3D Scene Generation from Single Image with Video Diffusion Model
Apr 03, 2025In this paper, we propose Scene Splatter, a momentum-based paradigm for video diffusion to generate generic scenes from single image. Existing methods, which employ video generation models to synthesize novel views, suffer from limited video length and scene inconsistency, leading to artifacts and distortions during further reconstruction. To address this issue, we construct noisy samples from original features as momentum to enhance video details and maintain scene consistency. However, for latent features with the perception field that spans both known and unknown regions, such latent-level momentum restricts the generative ability of video diffusion in unknown regions. Therefore, we further introduce the aforementioned consistent video as a pixel-level momentum to a directly generated video without momentum for better recovery of unseen regions. Our cascaded momentum enables video diffusion models to generate both high-fidelity and consistent novel views. We further finetune the global Gaussian representations with enhanced frames and render new frames for momentum update in the next step. In this manner, we can iteratively recover a 3D scene, avoiding the limitation of video length. Extensive experiments demonstrate the generalization capability and superior performance of our method in high-fidelity and consistent scene generation.
Gaussian Graph Network: Learning Efficient and Generalizable Gaussian Representations from Multi-view Images
Mar 20, 20253D Gaussian Splatting (3DGS) has demonstrated impressive novel view synthesis performance. While conventional methods require per-scene optimization, more recently several feed-forward methods have been proposed to generate pixel-aligned Gaussian representations with a learnable network, which are generalizable to different scenes. However, these methods simply combine pixel-aligned Gaussians from multiple views as scene representations, thereby leading to artifacts and extra memory cost without fully capturing the relations of Gaussians from different images. In this paper, we propose Gaussian Graph Network (GGN) to generate efficient and generalizable Gaussian representations. Specifically, we construct Gaussian Graphs to model the relations of Gaussian groups from different views. To support message passing at Gaussian level, we reformulate the basic graph operations over Gaussian representations, enabling each Gaussian to benefit from its connected Gaussian groups with Gaussian feature fusion. Furthermore, we design a Gaussian pooling layer to aggregate various Gaussian groups for efficient representations. We conduct experiments on the large-scale RealEstate10K and ACID datasets to demonstrate the efficiency and generalization of our method. Compared to the state-of-the-art methods, our model uses fewer Gaussians and achieves better image quality with higher rendering speed.
Physics3D: Learning Physical Properties of 3D Gaussians via Video Diffusion
Jun 07, 2024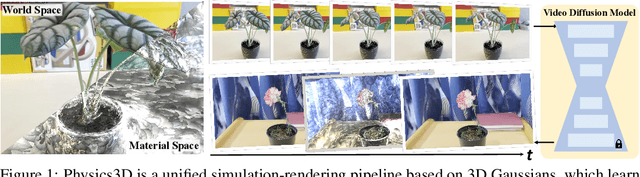

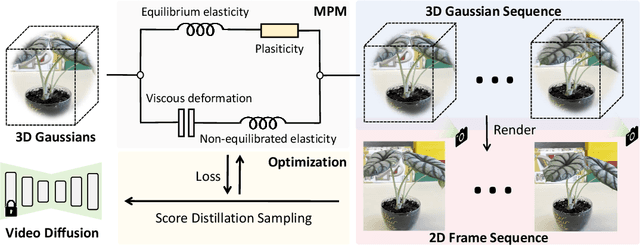

In recent years, there has been rapid development in 3D generation models, opening up new possibilities for applications such as simulating the dynamic movements of 3D objects and customizing their behaviors. However, current 3D generative models tend to focus only on surface features such as color and shape, neglecting the inherent physical properties that govern the behavior of objects in the real world. To accurately simulate physics-aligned dynamics, it is essential to predict the physical properties of materials and incorporate them into the behavior prediction process. Nonetheless, predicting the diverse materials of real-world objects is still challenging due to the complex nature of their physical attributes. In this paper, we propose \textbf{Physics3D}, a novel method for learning various physical properties of 3D objects through a video diffusion model. Our approach involves designing a highly generalizable physical simulation system based on a viscoelastic material model, which enables us to simulate a wide range of materials with high-fidelity capabilities. Moreover, we distill the physical priors from a video diffusion model that contains more understanding of realistic object materials. Extensive experiments demonstrate the effectiveness of our method with both elastic and plastic materials. Physics3D shows great potential for bridging the gap between the physical world and virtual neural space, providing a better integration and application of realistic physical principles in virtual environments. Project page: https://liuff19.github.io/Physics3D.
GeoAuxNet: Towards Universal 3D Representation Learning for Multi-sensor Point Clouds
Mar 28, 2024



Point clouds captured by different sensors such as RGB-D cameras and LiDAR possess non-negligible domain gaps. Most existing methods design different network architectures and train separately on point clouds from various sensors. Typically, point-based methods achieve outstanding performances on even-distributed dense point clouds from RGB-D cameras, while voxel-based methods are more efficient for large-range sparse LiDAR point clouds. In this paper, we propose geometry-to-voxel auxiliary learning to enable voxel representations to access point-level geometric information, which supports better generalisation of the voxel-based backbone with additional interpretations of multi-sensor point clouds. Specifically, we construct hierarchical geometry pools generated by a voxel-guided dynamic point network, which efficiently provide auxiliary fine-grained geometric information adapted to different stages of voxel features. We conduct experiments on joint multi-sensor datasets to demonstrate the effectiveness of GeoAuxNet. Enjoying elaborate geometric information, our method outperforms other models collectively trained on multi-sensor datasets, and achieve competitive results with the-state-of-art experts on each single dataset.
Convergence Analysis of Nonconvex Distributed Stochastic Zeroth-order Coordinate Method
Mar 24, 2021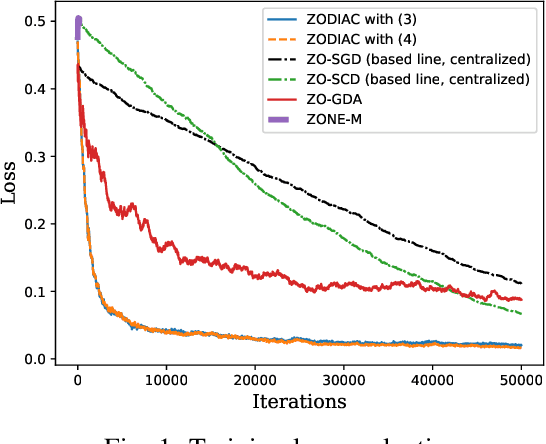
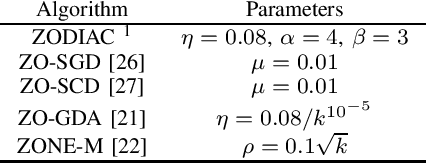
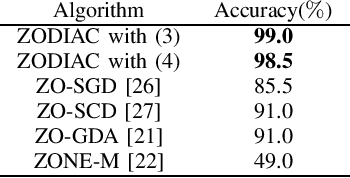
This paper investigates the stochastic distributed nonconvex optimization problem of minimizing a global cost function formed by the summation of $n$ local cost functions. We solve such a problem by involving zeroth-order (ZO) information exchange. In this paper, we propose a ZO distributed primal-dual coordinate method (ZODIAC) to solve the stochastic optimization problem. Agents approximate their own local stochastic ZO oracle along with coordinates with an adaptive smoothing parameter. We show that the proposed algorithm achieves the convergence rate of $\mathcal{O}(\sqrt{p}/\sqrt{T})$ for general nonconvex cost functions. We demonstrate the efficiency of proposed algorithms through a numerical example in comparison with the existing state-of-the-art centralized and distributed ZO algorithms.
Extremal Region Analysis based Deep Learning Framework for Detecting Defects
Mar 19, 2020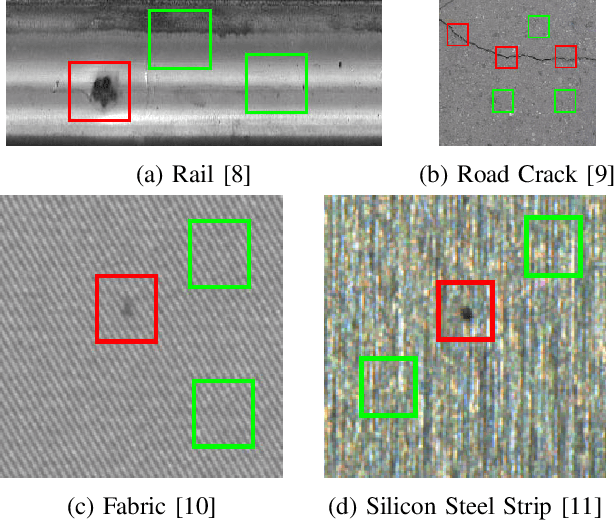

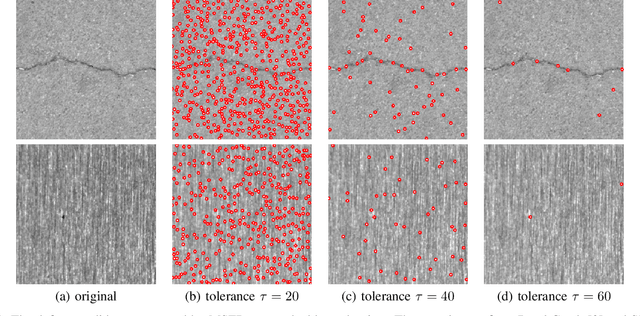
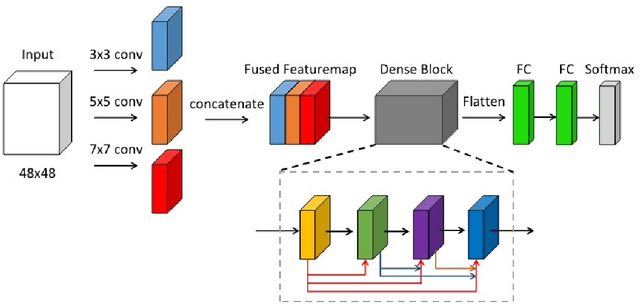
A maximally stable extreme region (MSER) analysis based convolutional neural network (CNN) for unified defect detection framework is proposed in this paper. Our proposed framework utilizes the generality and stability of MSER to generate the desired defect candidates. Then a specific trained binary CNN classifier is adopted over the defect candidates to produce the final defect set. Defect datasets over different categories \blue{are used} in the experiments. More generally, the parameter settings in MSER can be adjusted to satisfy different requirements in various industries (high precision, high recall, etc). Extensive experimental results have shown the efficacy of the proposed framework.