 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal least-squares solution to the hand-eye calibration problem
Feb 25, 2020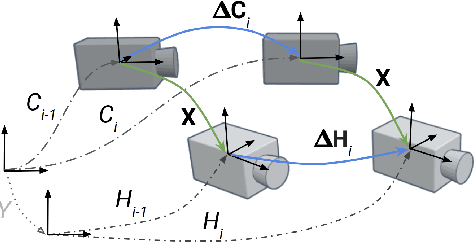
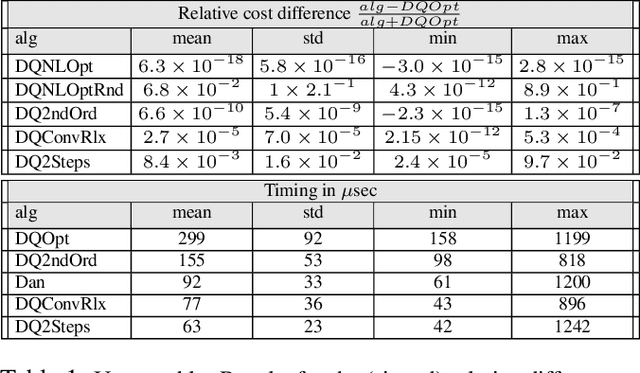

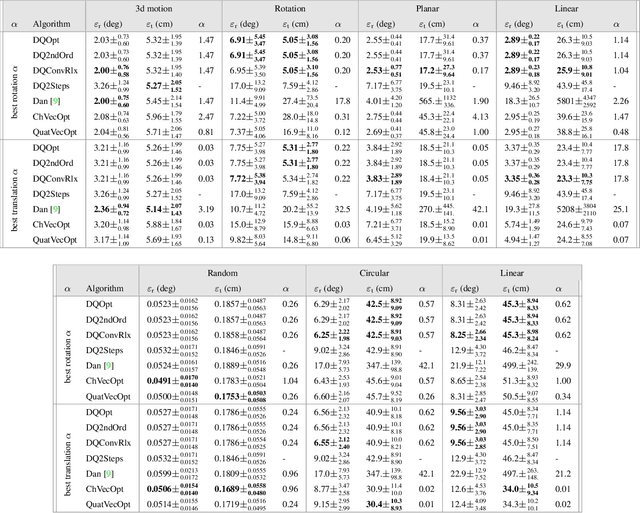
We propose a least-squares formulation to the noisy hand-eye calibration problem using dual-quaternions, and introduce efficient algorithms to find the exact optimal solution, based on analytic properties of the problem, avoiding non-linear optimization. We further present simple analytic approximate solutions which provide remarkably good estimations compared to the exact solution. In addition, we show how to generalize our solution to account for a given extrinsic prior in the cost function. To the best of our knowledge our algorithm is the most efficient approach to optimally solve the hand-eye calibration problem.
Joint 3D Reconstruction of a Static Scene and Moving Objects
Feb 13, 2018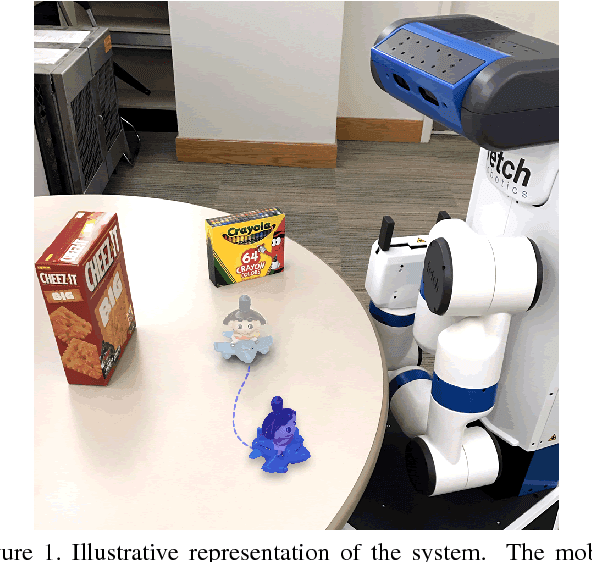
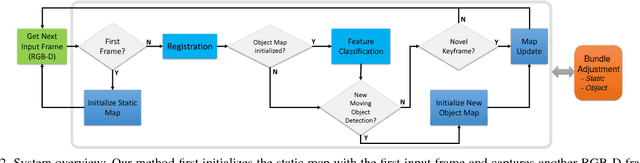
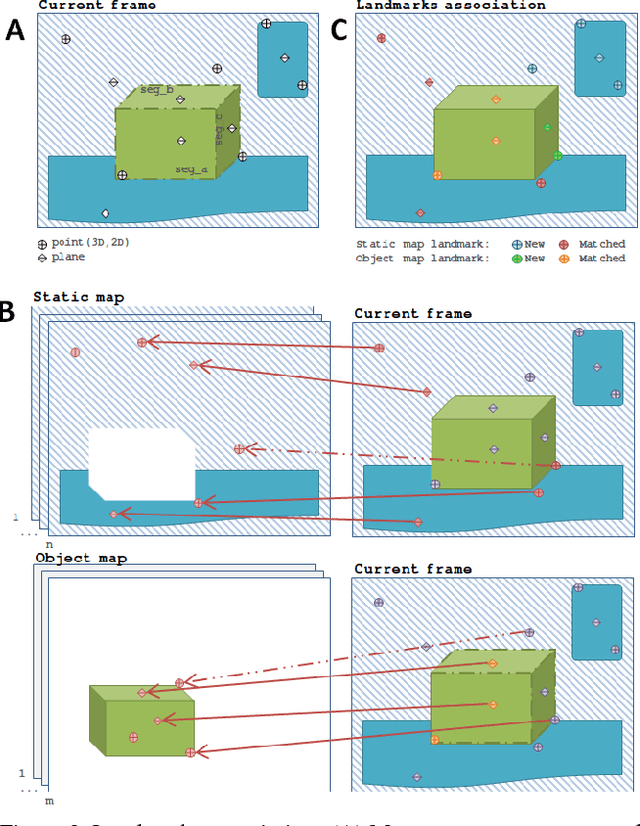
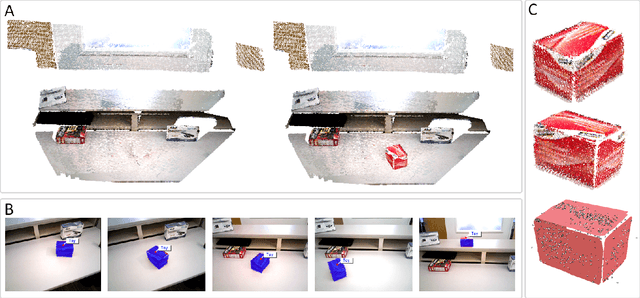
We present a technique for simultaneous 3D reconstruction of static regions and rigidly moving objects in a scene. An RGB-D frame is represented as a collection of features, which are points and planes. We classify the features into static and dynamic regions and grow separate maps, static and object maps, for each of them. To robustly classify the features in each frame, we fuse multiple RANSAC-based registration results obtained by registering different groups of the features to different maps, including (1) all the features to the static map, (2) all the features to each object map, and (3) subsets of the features, each forming a segment, to each object map. This multi-group registration approach is designed to overcome the following challenges: scenes can be dominated by static regions, making object tracking more difficult; and moving object might have larger pose variation between frames compared to the static regions. We show qualitative results from indoor scenes with objects in various shapes. The technique enables on-the-fly object model generation to be used for robotic manipulation.
* This paper has been accepted and presented in 3DV-2017 conference held at Qingdao, China. Video experiments: https://youtu.be/goflUxzG2VI
Active Perception and Modeling of Deformable Surfaces using Gaussian Processes and Position-based Dynamics
Feb 13, 2018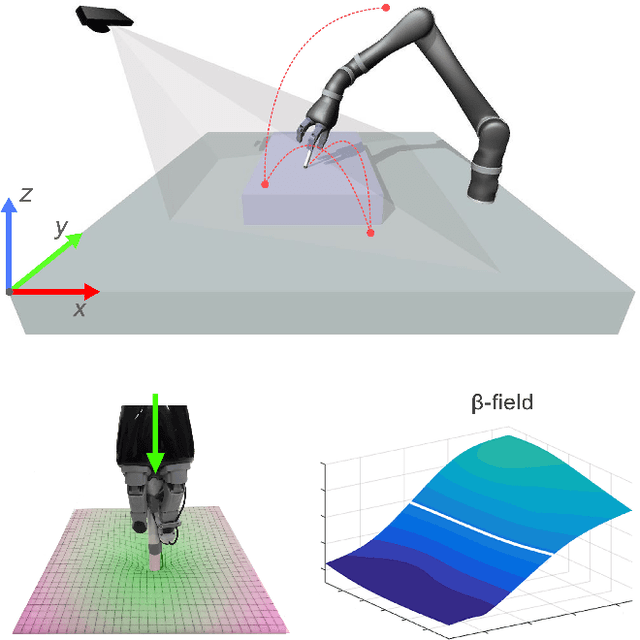
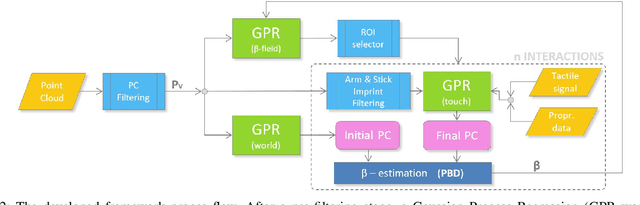
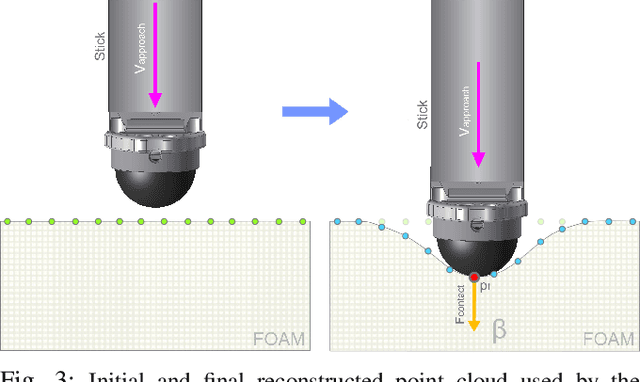
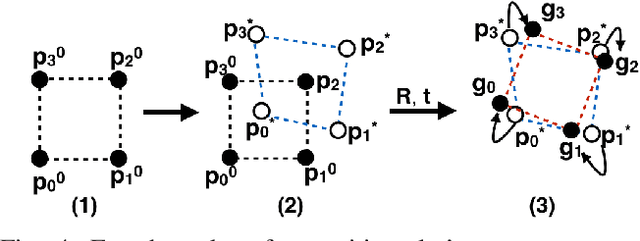
Exploring and modeling heterogeneous elastic surfaces requires multiple interactions with the environment and a complex selection of physical material parameters. The most common approaches model deformable properties from sets of offline observations using computationally expensive force-based simulators. In this work we present an online probabilistic framework for autonomous estimation of a deformability distribution map of heterogeneous elastic surfaces from few physical interactions. The method takes advantage of Gaussian Processes for constructing a model of the environment geometry surrounding a robot. A fast Position-based Dynamics simulator uses focused environmental observations in order to model the elastic behavior of portions of the environment. Gaussian Process Regression maps the local deformability on the whole environment in order to generate a deformability distribution map. We show experimental results using a PrimeSense camera, a Kinova Jaco2 robotic arm and an Optoforce sensor on different deformable surfaces.
* 8 pages, video of an experiment available at https://youtu.be/mDNSDZz7Qzs
Active Exploration Using Gaussian Random Fields and Gaussian Process Implicit Surfaces
Feb 13, 2018



In this work we study the problem of exploring surfaces and building compact 3D representations of the environment surrounding a robot through active perception. We propose an online probabilistic framework that merges visual and tactile measurements using Gaussian Random Field and Gaussian Process Implicit Surfaces. The system investigates incomplete point clouds in order to find a small set of regions of interest which are then physically explored with a robotic arm equipped with tactile sensors. We show experimental results obtained using a PrimeSense camera, a Kinova Jaco2 robotic arm and Optoforce sensors on different scenarios. We then demonstrate how to use the online framework for object detection and terrain classification.
* 8 pages, 6 figures, external contents (https://youtu.be/0-UlFRQT0JI)
A New UGV Teleoperation Interface for Improved Awareness of Network Connectivity and Physical Surroundings
Nov 07, 2017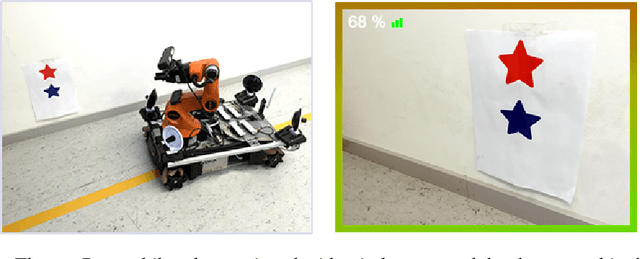

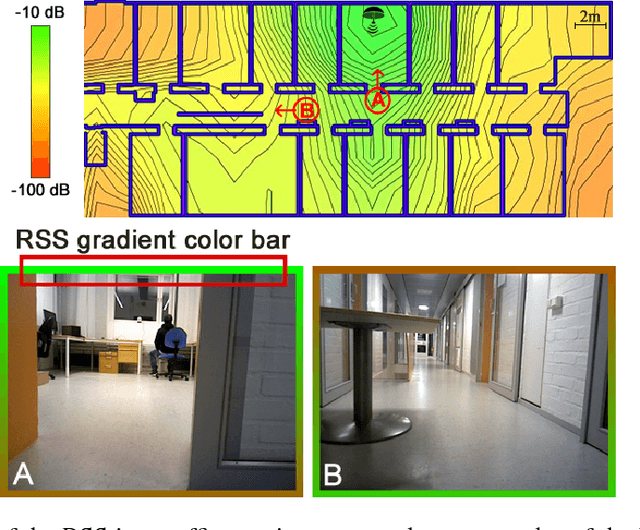
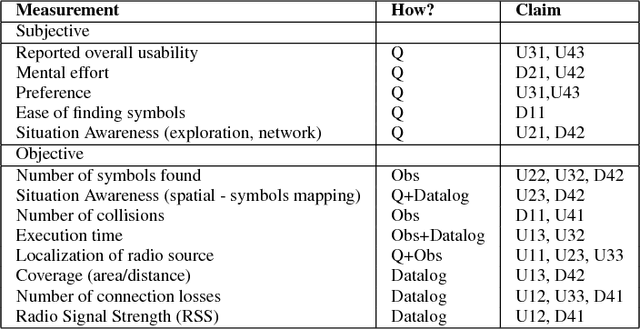
A reliable wireless connection between the operator and the teleoperated Unmanned Ground Vehicle (UGV) is critical in many Urban Search and Rescue (USAR) missions. Unfortunately, as was seen in e.g. the Fukushima disaster, the networks available in areas where USAR missions take place are often severely limited in range and coverage. Therefore, during mission execution, the operator needs to keep track of not only the physical parts of the mission, such as navigating through an area or searching for victims, but also the variations in network connectivity across the environment. In this paper, we propose and evaluate a new teleoperation User Interface (UI) that includes a way of estimating the Direction of Arrival (DoA) of the Radio Signal Strength (RSS) and integrating the DoA information in the interface. The evaluation shows that using the interface results in more objects found, and less aborted missions due to connectivity problems, as compared to a standard interface. The proposed interface is an extension to an existing interface centered around the video stream captured by the UGV. But instead of just showing the network signal strength in terms of percent and a set of bars, the additional information of DoA is added in terms of a color bar surrounding the video feed. With this information, the operator knows what movement directions are safe, even when moving in regions close to the connectivity threshold.
RCAMP: A Resilient Communication-Aware Motion Planner for Mobile Robots with Autonomous Repair of Wireless Connectivity
Oct 18, 2017



Mobile robots, be it autonomous or teleoperated, require stable communication with the base station to exchange valuable information. Given the stochastic elements in radio signal propagation, such as shadowing and fading, and the possibilities of unpredictable events or hardware failures, communication loss often presents a significant mission risk, both in terms of probability and impact, especially in Urban Search and Rescue (USAR) operations. Depending on the circumstances, disconnected robots are either abandoned or attempt to autonomously back-trace their way to the base station. Although recent results in Communication-Aware Motion Planning can be used to effectively manage connectivity with robots, there are no results focusing on autonomously re-establishing the wireless connectivity of a mobile robot without back-tracking or using detailed a priori information of the network. In this paper, we present a robust and online radio signal mapping method using Gaussian Random Fields and propose a Resilient Communication-Aware Motion Planner (RCAMP) that integrates the above signal mapping framework with a motion planner. RCAMP considers both the environment and the physical constraints of the robot, based on the available sensory information. We also propose a self-repair strategy using RCMAP, that takes both connectivity and the goal position into account when driving to a connection-safe position in the event of a communication loss. We demonstrate the proposed planner in a set of realistic simulations of an exploration task in single or multi-channel communication scenarios.
3D Object Discovery and Modeling Using Single RGB-D Images Containing Multiple Object Instances
Oct 17, 2017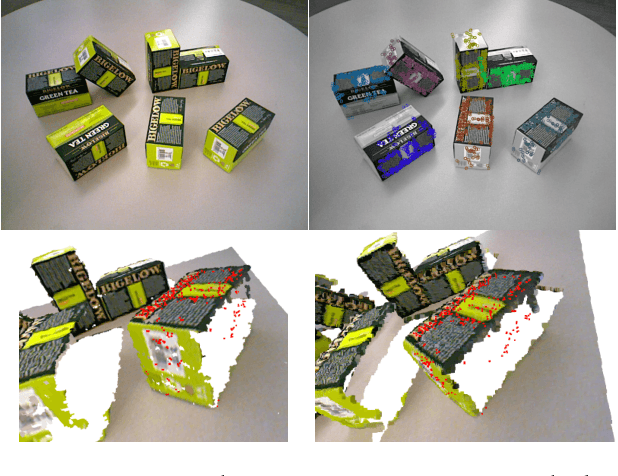
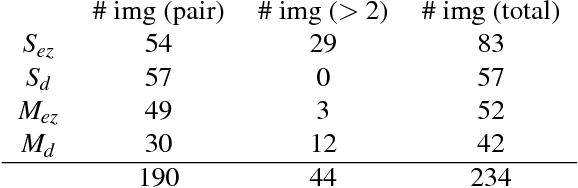
Unsupervised object modeling is important in robotics, especially for handling a large set of objects. We present a method for unsupervised 3D object discovery, reconstruction, and localization that exploits multiple instances of an identical object contained in a single RGB-D image. The proposed method does not rely on segmentation, scene knowledge, or user input, and thus is easily scalable. Our method aims to find recurrent patterns in a single RGB-D image by utilizing appearance and geometry of the salient regions. We extract keypoints and match them in pairs based on their descriptors. We then generate triplets of the keypoints matching with each other using several geometric criteria to minimize false matches. The relative poses of the matched triplets are computed and clustered to discover sets of triplet pairs with similar relative poses. Triplets belonging to the same set are likely to belong to the same object and are used to construct an initial object model. Detection of remaining instances with the initial object model using RANSAC allows to further expand and refine the model. The automatically generated object models are both compact and descriptive. We show quantitative and qualitative results on RGB-D images with various objects including some from the Amazon Picking Challenge. We also demonstrate the use of our method in an object picking scenario with a robotic arm.
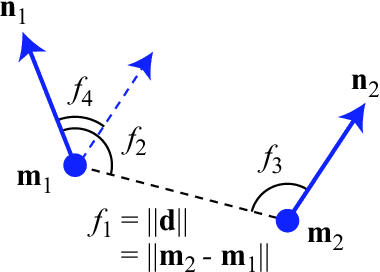
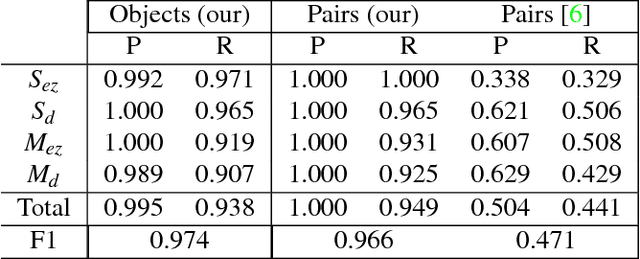
Detecting and Grouping Identical Objects for Region Proposal and Classification
Jul 23, 2017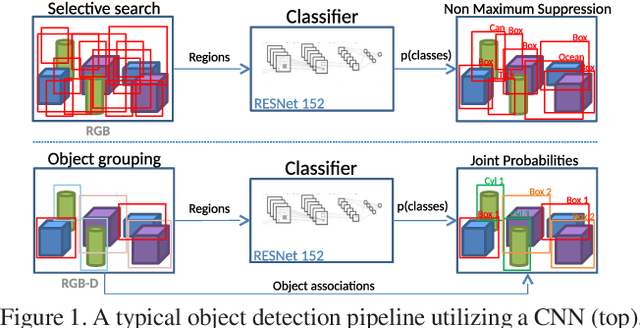
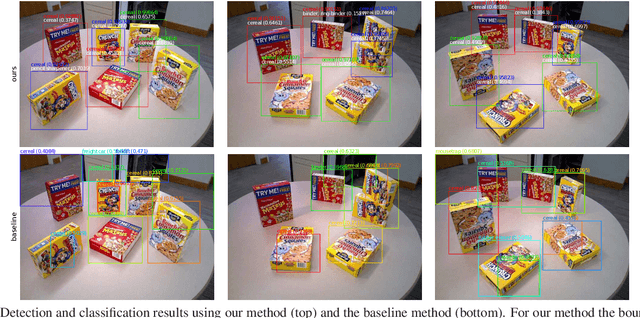
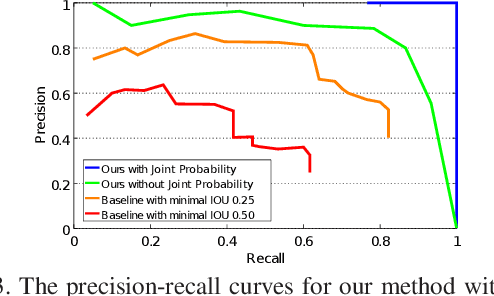
Often multiple instances of an object occur in the same scene, for example in a warehouse. Unsupervised multi-instance object discovery algorithms are able to detect and identify such objects. We use such an algorithm to provide object proposals to a convolutional neural network (CNN) based classifier. This results in fewer regions to evaluate, compared to traditional region proposal algorithms. Additionally, it enables using the joint probability of multiple instances of an object, resulting in improved classification accuracy. The proposed technique can also split a single class into multiple sub-classes corresponding to the different object types, enabling hierarchical classification.