 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFine-Grained Alignment in Vision-and-Language Navigation through Bayesian Optimization
Nov 22, 2024



This paper addresses the challenge of fine-grained alignment in Vision-and-Language Navigation (VLN) tasks, where robots navigate realistic 3D environments based on natural language instructions. Current approaches use contrastive learning to align language with visual trajectory sequences. Nevertheless, they encounter difficulties with fine-grained vision negatives. To enhance cross-modal embeddings, we introduce a novel Bayesian Optimization-based adversarial optimization framework for creating fine-grained contrastive vision samples. To validate the proposed methodology, we conduct a series of experiments to assess the effectiveness of the enriched embeddings on fine-grained vision negatives. We conduct experiments on two common VLN benchmarks R2R and REVERIE, experiments on the them demonstrate that these embeddings benefit navigation, and can lead to a promising performance enhancement. Our source code and trained models are available at: https://anonymous.4open.science/r/FGVLN.
3D Multi-Robot Patrolling with a Two-Level Coordination Strategy
Jun 23, 2019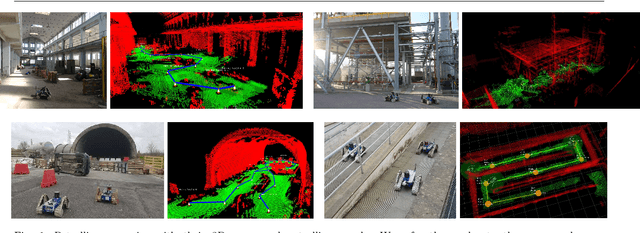
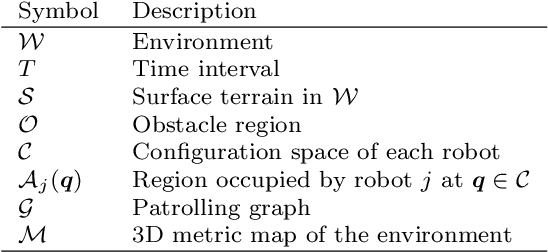
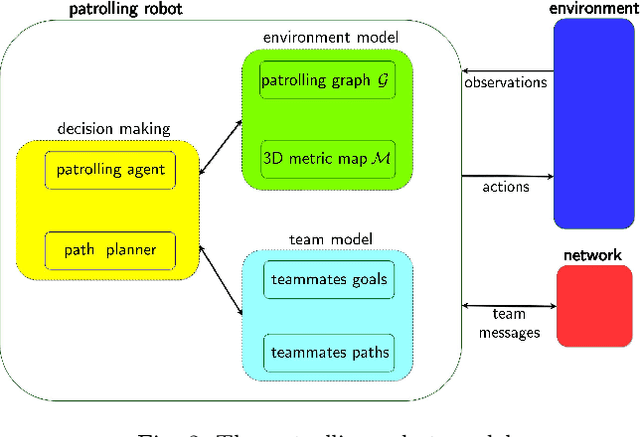
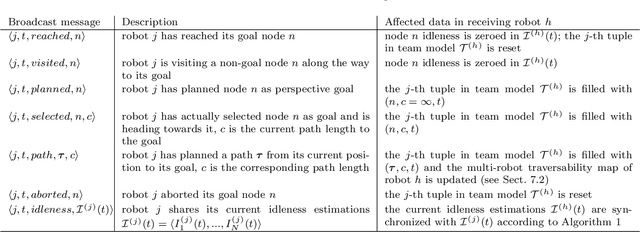
Teams of UGVs patrolling harsh and complex 3D environments can experience interference and spatial conflicts with one another. Neglecting the occurrence of these events crucially hinders both soundness and reliability of a patrolling process. This work presents a distributed multi-robot patrolling technique, which uses a two-level coordination strategy to minimize and explicitly manage the occurrence of conflicts and interference. The first level guides the agents to single out exclusive target nodes on a topological map. This target selection relies on a shared idleness representation and a coordination mechanism preventing topological conflicts. The second level hosts coordination strategies based on a metric representation of space and is supported by a 3D SLAM system. Here, each robot path planner negotiates spatial conflicts by applying a multi-robot traversability function. Continuous interactions between these two levels ensure coordination and conflicts resolution. Both simulations and real-world experiments are presented to validate the performances of the proposed patrolling strategy in 3D environments. Results show this is a promising solution for managing spatial conflicts and preventing deadlocks.
A Hybrid Approach for Trajectory Control Design
Jan 05, 2019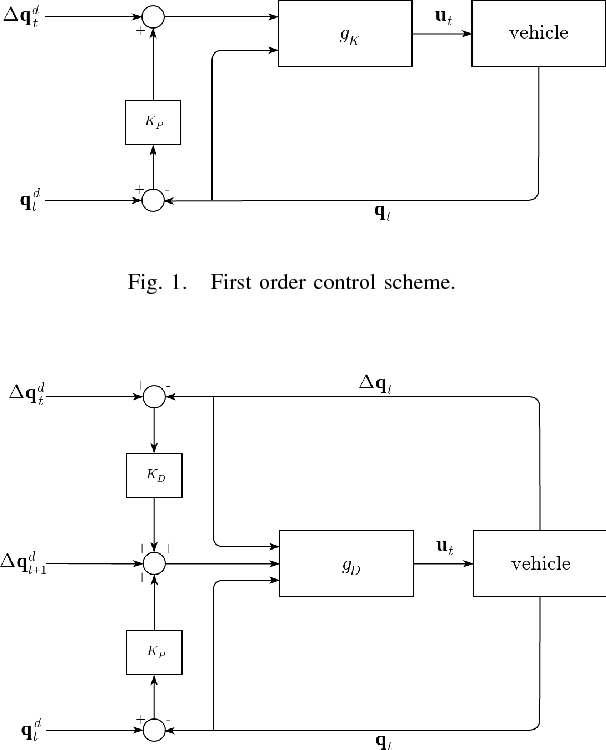
This work presents a methodology to design trajectory tracking feedback control laws, which embed non-parametric statistical models, such as Gaussian Processes (GPs). The aim is to minimize unmodeled dynamics such as undesired slippages. The proposed approach has the benefit of avoiding complex terramechanics analysis to directly estimate from data the robot dynamics on a wide class of trajectories. Experiments in both real and simulated environments prove that the proposed methodology is promising.
RCAMP: A Resilient Communication-Aware Motion Planner for Mobile Robots with Autonomous Repair of Wireless Connectivity
Oct 18, 2017



Mobile robots, be it autonomous or teleoperated, require stable communication with the base station to exchange valuable information. Given the stochastic elements in radio signal propagation, such as shadowing and fading, and the possibilities of unpredictable events or hardware failures, communication loss often presents a significant mission risk, both in terms of probability and impact, especially in Urban Search and Rescue (USAR) operations. Depending on the circumstances, disconnected robots are either abandoned or attempt to autonomously back-trace their way to the base station. Although recent results in Communication-Aware Motion Planning can be used to effectively manage connectivity with robots, there are no results focusing on autonomously re-establishing the wireless connectivity of a mobile robot without back-tracking or using detailed a priori information of the network. In this paper, we present a robust and online radio signal mapping method using Gaussian Random Fields and propose a Resilient Communication-Aware Motion Planner (RCAMP) that integrates the above signal mapping framework with a motion planner. RCAMP considers both the environment and the physical constraints of the robot, based on the available sensory information. We also propose a self-repair strategy using RCMAP, that takes both connectivity and the goal position into account when driving to a connection-safe position in the event of a communication loss. We demonstrate the proposed planner in a set of realistic simulations of an exploration task in single or multi-channel communication scenarios.