 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Multi-Robot Patrolling with a Two-Level Coordination Strategy
Jun 23, 2019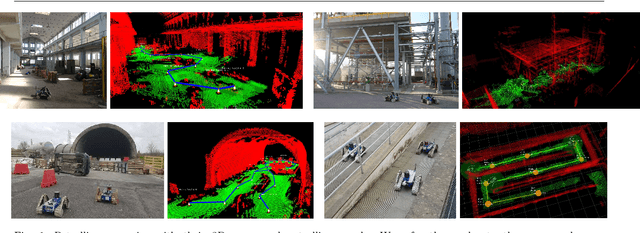
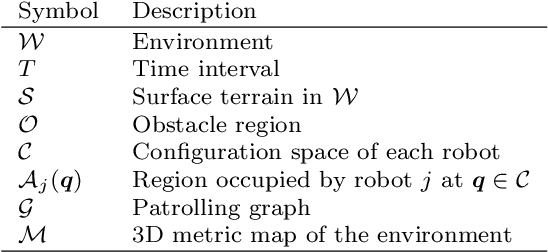
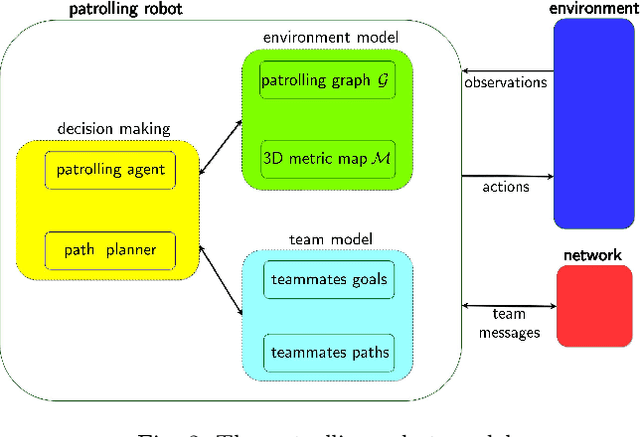
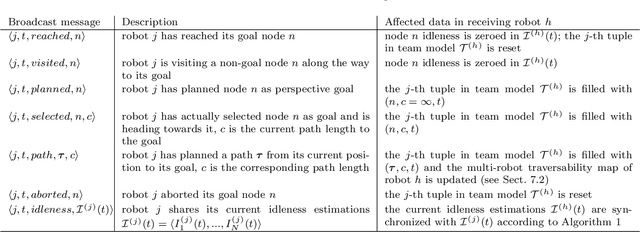
Teams of UGVs patrolling harsh and complex 3D environments can experience interference and spatial conflicts with one another. Neglecting the occurrence of these events crucially hinders both soundness and reliability of a patrolling process. This work presents a distributed multi-robot patrolling technique, which uses a two-level coordination strategy to minimize and explicitly manage the occurrence of conflicts and interference. The first level guides the agents to single out exclusive target nodes on a topological map. This target selection relies on a shared idleness representation and a coordination mechanism preventing topological conflicts. The second level hosts coordination strategies based on a metric representation of space and is supported by a 3D SLAM system. Here, each robot path planner negotiates spatial conflicts by applying a multi-robot traversability function. Continuous interactions between these two levels ensure coordination and conflicts resolution. Both simulations and real-world experiments are presented to validate the performances of the proposed patrolling strategy in 3D environments. Results show this is a promising solution for managing spatial conflicts and preventing deadlocks.
Autonomous Electric Race Car Design
Nov 01, 2017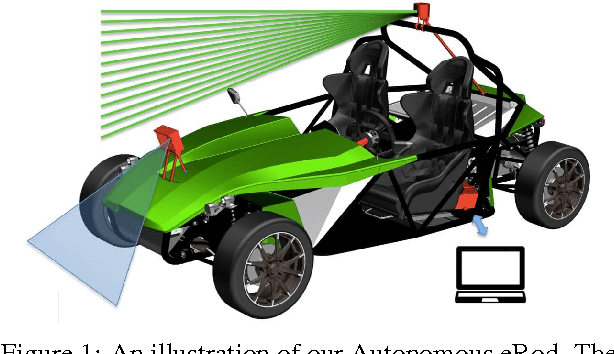
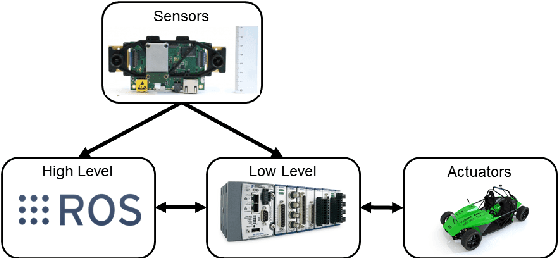
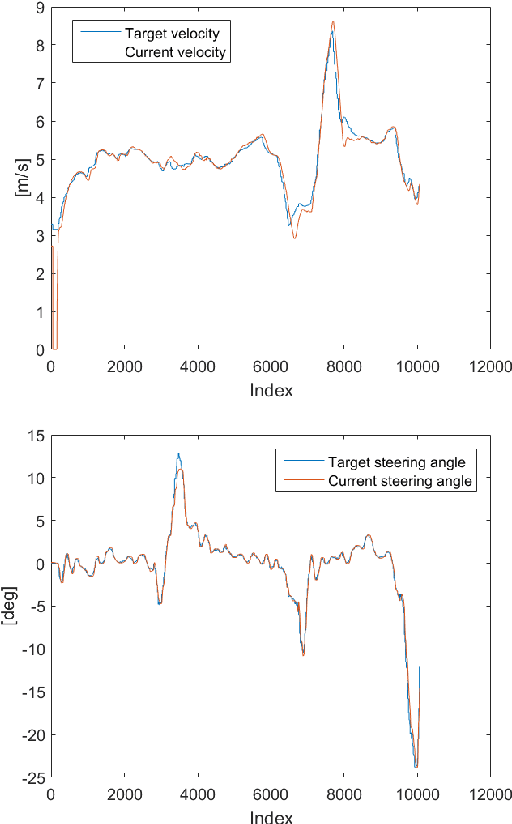
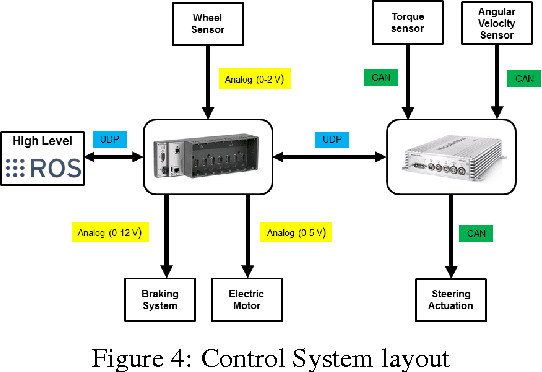
Autonomous driving and electric vehicles are nowadays very active research and development areas. In this paper we present the conversion of a standard Kyburz eRod into an autonomous vehicle that can be operated in challenging environments such as Swiss mountain passes. The overall hardware and software architectures are described in detail with a special emphasis on the sensor requirements for autonomous vehicles operating in partially structured environments. Furthermore, the design process itself and the finalized system architecture are presented. The work shows state of the art results in localization and controls for self-driving high-performance electric vehicles. Test results of the overall system are presented, which show the importance of generalizable state estimation algorithms to handle a plethora of conditions.