 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAscento: A Two-Wheeled Jumping Robot
May 23, 2020
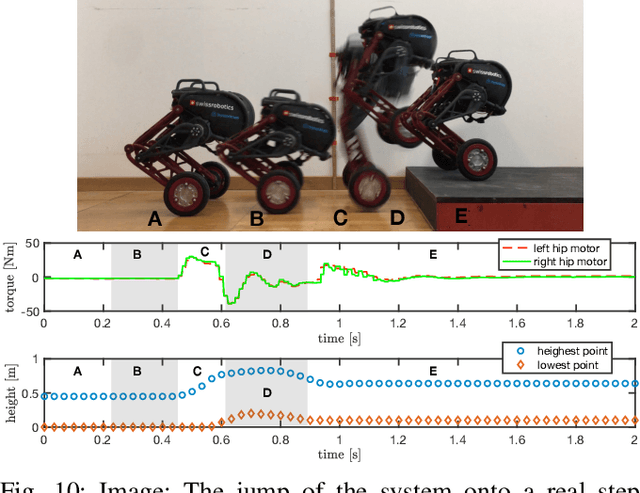
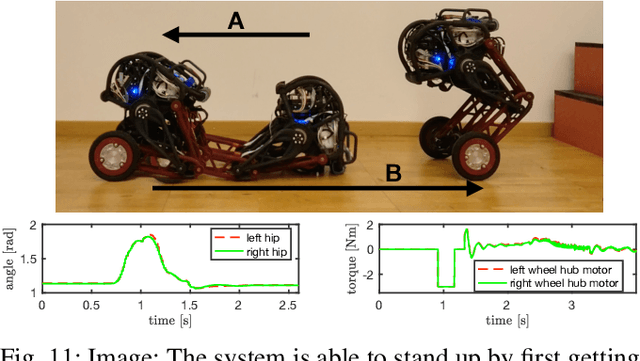
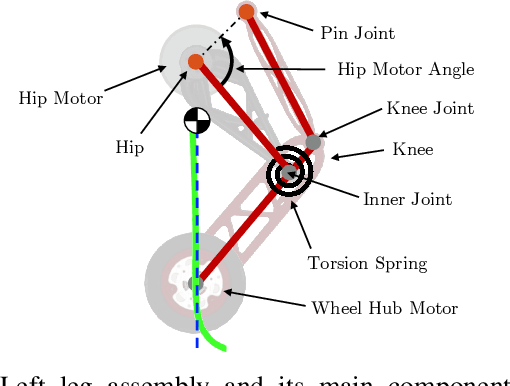
Applications of mobile ground robots demand high speed and agility while navigating in complex indoor environments. These present an ongoing challenge in mobile robotics. A system with these specifications would be of great use for a wide range of indoor inspection tasks. This paper introduces Ascento, a compact wheeled bipedal robot that is able to move quickly on flat terrain, and to overcome obstacles by jumping. The mechanical design and overall architecture of the system is presented, as well as the development of various controllers for different scenarios. A series of experiments with the final prototype system validate these behaviors in realistic scenarios.
* 7 pages, 11 Figures, ICRA 2019
Autonomous Electric Race Car Design
Nov 01, 2017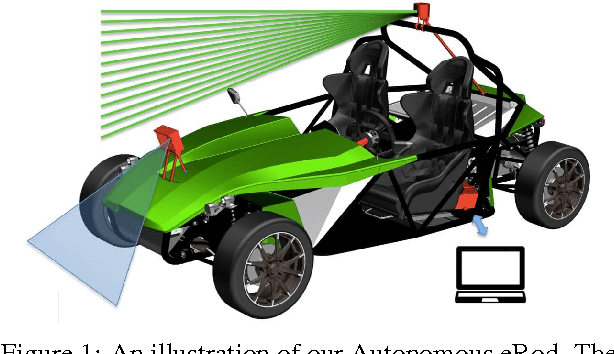
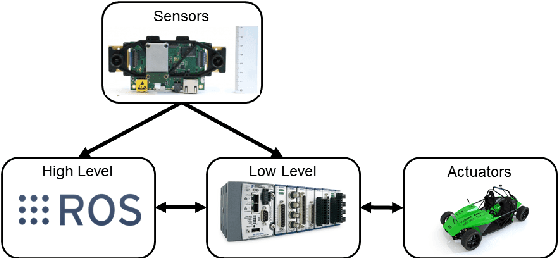
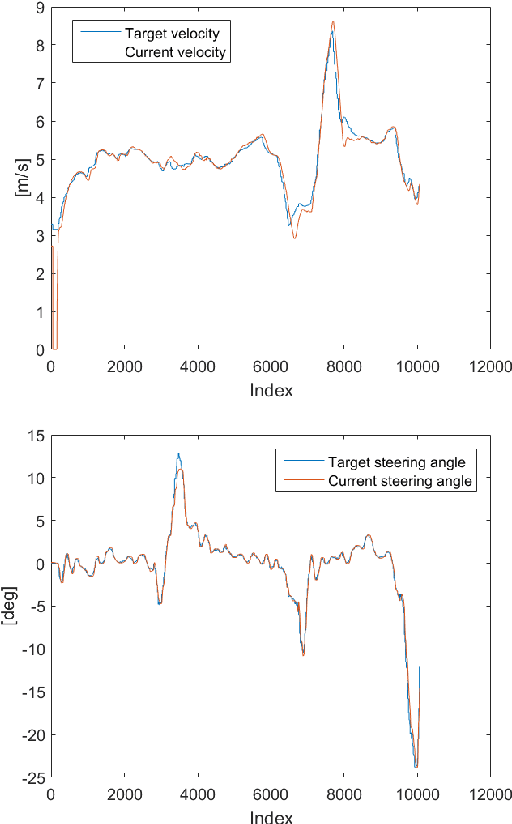
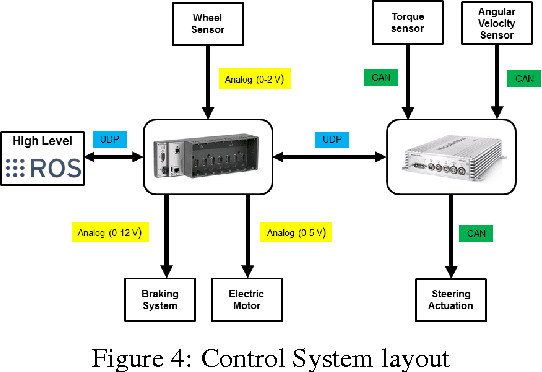
Autonomous driving and electric vehicles are nowadays very active research and development areas. In this paper we present the conversion of a standard Kyburz eRod into an autonomous vehicle that can be operated in challenging environments such as Swiss mountain passes. The overall hardware and software architectures are described in detail with a special emphasis on the sensor requirements for autonomous vehicles operating in partially structured environments. Furthermore, the design process itself and the finalized system architecture are presented. The work shows state of the art results in localization and controls for self-driving high-performance electric vehicles. Test results of the overall system are presented, which show the importance of generalizable state estimation algorithms to handle a plethora of conditions.