 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Perception and Modeling of Deformable Surfaces using Gaussian Processes and Position-based Dynamics
Feb 13, 2018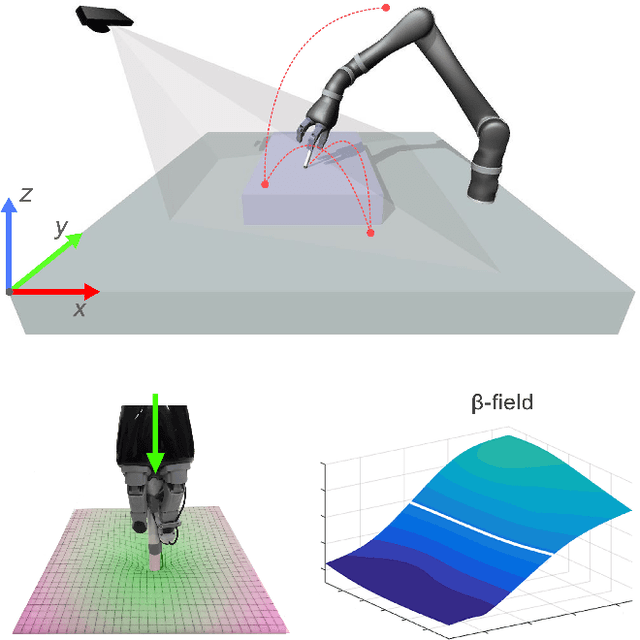
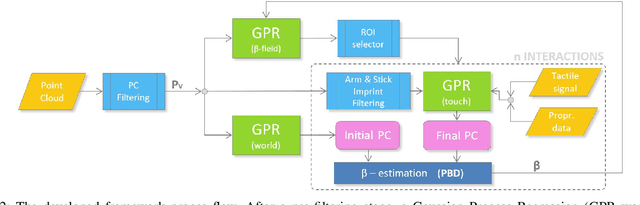
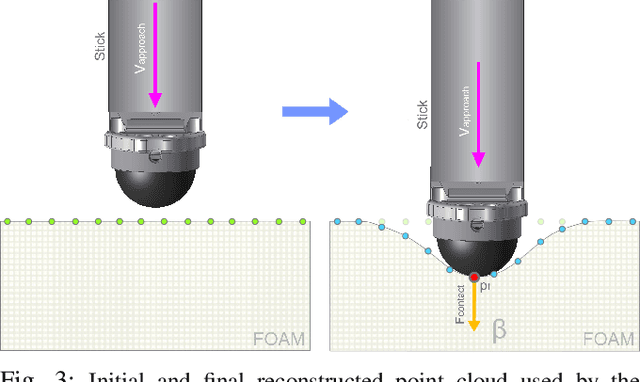
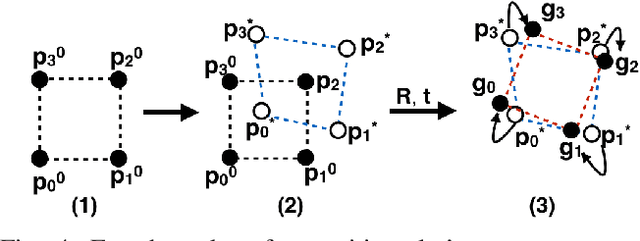
Exploring and modeling heterogeneous elastic surfaces requires multiple interactions with the environment and a complex selection of physical material parameters. The most common approaches model deformable properties from sets of offline observations using computationally expensive force-based simulators. In this work we present an online probabilistic framework for autonomous estimation of a deformability distribution map of heterogeneous elastic surfaces from few physical interactions. The method takes advantage of Gaussian Processes for constructing a model of the environment geometry surrounding a robot. A fast Position-based Dynamics simulator uses focused environmental observations in order to model the elastic behavior of portions of the environment. Gaussian Process Regression maps the local deformability on the whole environment in order to generate a deformability distribution map. We show experimental results using a PrimeSense camera, a Kinova Jaco2 robotic arm and an Optoforce sensor on different deformable surfaces.
* 8 pages, video of an experiment available at https://youtu.be/mDNSDZz7Qzs