 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Learning POMDPs Beyond Full-Rank Actions and State Observability
Jan 26, 2026We are interested in enabling autonomous agents to learn and reason about systems with hidden states, such as furniture with hidden locking mechanisms. We cast this problem as learning the parameters of a discrete Partially Observable Markov Decision Process (POMDP). The agent begins with knowledge of the POMDP's actions and observation spaces, but not its state space, transitions, or observation models. These properties must be constructed from action-observation sequences. Spectral approaches to learning models of partially observable domains, such as learning Predictive State Representations (PSRs), are known to directly estimate the number of hidden states. These methods cannot, however, yield direct estimates of transition and observation likelihoods, which are important for many downstream reasoning tasks. Other approaches leverage tensor decompositions to estimate transition and observation likelihoods but often assume full state observability and full-rank transition matrices for all actions. To relax these assumptions, we study how PSRs learn transition and observation matrices up to a similarity transform, which may be estimated via tensor methods. Our method learns observation matrices and transition matrices up to a partition of states, where the states in a single partition have the same observation distributions corresponding to actions whose transition matrices are full-rank. Our experiments suggest that these partition-level transition models learned by our method, with a sufficient amount of data, meets the performance of PSRs as models to be used by standard sampling-based POMDP solvers. Furthermore, the explicit observation and transition likelihoods can be leveraged to specify planner behavior after the model has been learned.
Learning Attentive Neural Processes for Planning with Pushing Actions
Apr 24, 2025Our goal is to enable robots to plan sequences of tabletop actions to push a block with unknown physical properties to a desired goal pose on the table. We approach this problem by learning the constituent models of a Partially-Observable Markov Decision Process (POMDP), where the robot can observe the outcome of a push, but the physical properties of the block that govern the dynamics remain unknown. The pushing problem is a difficult POMDP to solve due to the challenge of state estimation. The physical properties have a nonlinear relationship with the outcomes, requiring computationally expensive methods, such as particle filters, to represent beliefs. Leveraging the Attentive Neural Process architecture, we propose to replace the particle filter with a neural network that learns the inference computation over the physical properties given a history of actions. This Neural Process is integrated into planning as the Neural Process Tree with Double Progressive Widening (NPT-DPW). Simulation results indicate that NPT-DPW generates more effective plans faster than traditional particle filter methods, even in complex pushing scenarios.
Towards Practical Finite Sample Bounds for Motion Planning in TAMP
Jul 24, 2024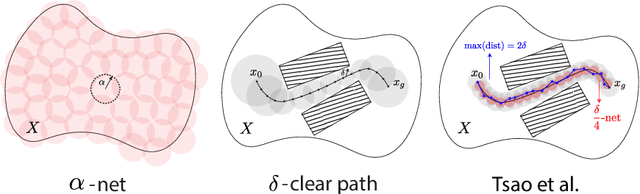
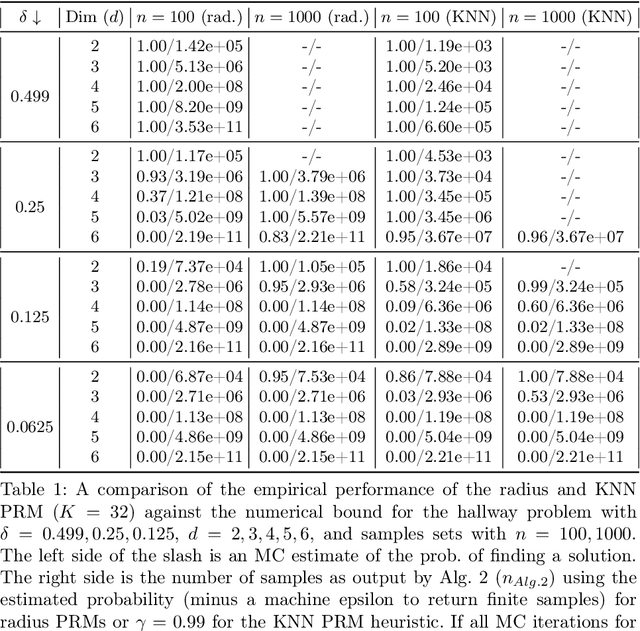
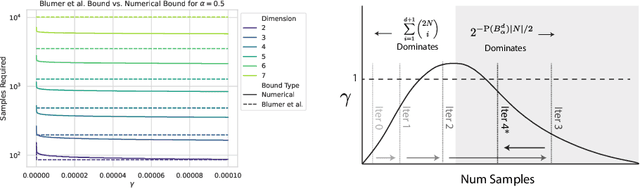
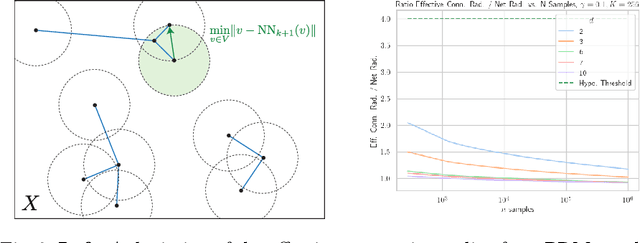
When using sampling-based motion planners, such as PRMs, in configuration spaces, it is difficult to determine how many samples are required for the PRM to find a solution consistently. This is relevant in Task and Motion Planning (TAMP), where many motion planning problems must be solved in sequence. We attempt to solve this problem by proving an upper bound on the number of samples that are sufficient, with high probability, to find a solution by drawing on prior work in deterministic sampling and sample complexity theory. We also introduce a numerical algorithm to compute a tighter number of samples based on the proof of the sample complexity theorem we apply to derive our bound. Our experiments show that our numerical bounding algorithm is tight within two orders of magnitude on planar planning problems and becomes looser as the problem's dimensionality increases. When deployed as a heuristic to schedule samples in a TAMP planner, we also observe planning time improvements in planar problems. While our experiments show much work remains to tighten our bounds, the ideas presented in this paper are a step towards a practical sample bound.
Constrained Bimanual Planning with Analytic Inverse Kinematics
Sep 15, 2023



In order for a bimanual robot to manipulate an object that is held by both hands, it must construct motion plans such that the transformation between its end effectors remains fixed. This amounts to complicated nonlinear equality constraints in the configuration space, which are difficult for trajectory optimizers. In addition, the set of feasible configurations becomes a measure zero set, which presents a challenge to sampling-based motion planners. We leverage an analytic solution to the inverse kinematics problem to parametrize the configuration space, resulting in a lower-dimensional representation where the set of valid configurations has positive measure. We describe how to use this parametrization with existing algorithms for motion planning, including sampling-based approaches, trajectory optimizers, and techniques that plan through convex inner-approximations of collision-free space.
Constrained Dynamic Movement Primitives for Safe Learning of Motor Skills
Sep 28, 2022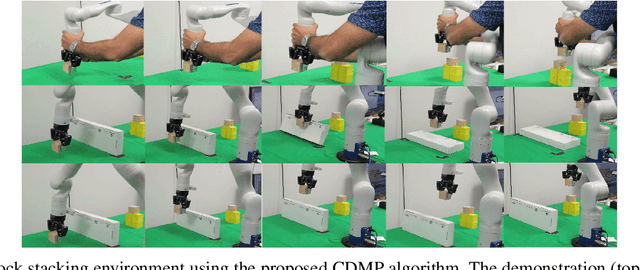
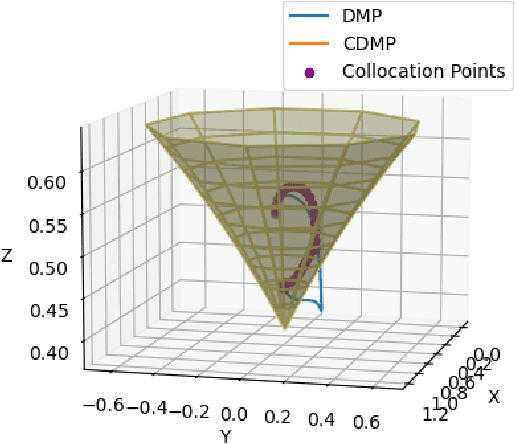
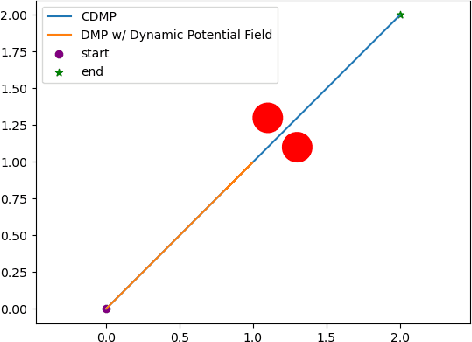
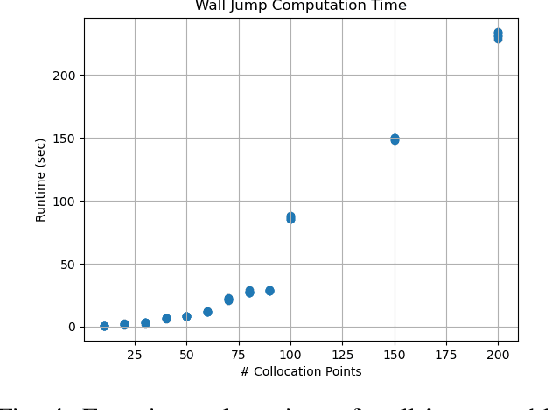
Dynamic movement primitives are widely used for learning skills which can be demonstrated to a robot by a skilled human or controller. While their generalization capabilities and simple formulation make them very appealing to use, they possess no strong guarantees to satisfy operational safety constraints for a task. In this paper, we present constrained dynamic movement primitives (CDMP) which can allow for constraint satisfaction in the robot workspace. We present a formulation of a non-linear optimization to perturb the DMP forcing weights regressed by locally-weighted regression to admit a Zeroing Barrier Function (ZBF), which certifies workspace constraint satisfaction. We demonstrate the proposed CDMP under different constraints on the end-effector movement such as obstacle avoidance and workspace constraints on a physical robot. A video showing the implementation of the proposed algorithm using different manipulators in different environments could be found here https://youtu.be/hJegJJkJfys.
RMPs for Safe Impedance Control in Contact-Rich Manipulation
Sep 24, 2021
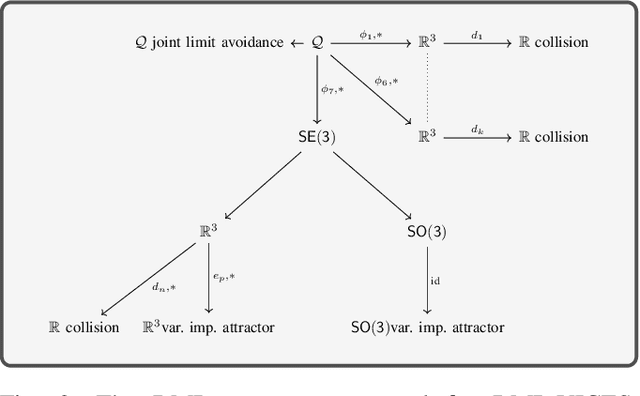
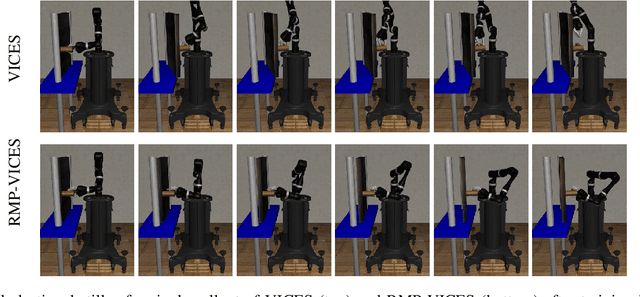
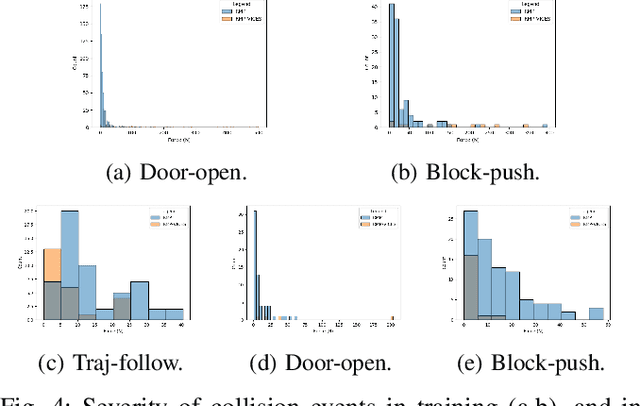
Variable impedance control in operation-space is a promising approach to learning contact-rich manipulation behaviors. One of the main challenges with this approach is producing a manipulation behavior that ensures the safety of the arm and the environment. Such behavior is typically implemented via a reward function that penalizes unsafe actions (e.g. obstacle collision, joint limit extension), but that approach is not always effective and does not result in behaviors that can be reused in slightly different environments. We show how to combine Riemannian Motion Policies, a class of policies that dynamically generate motion in the presence of safety and collision constraints, with variable impedance operation-space control to learn safer contact-rich manipulation behaviors.