 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Spatial Predictive Control with Application to Drone Flocking (Extended Version)
Mar 31, 2022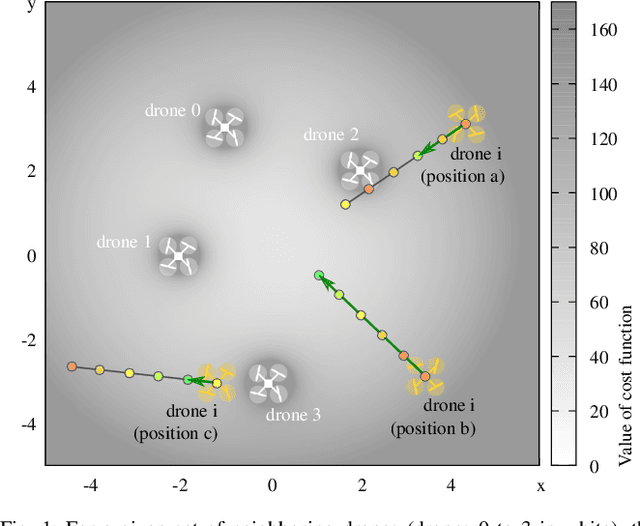
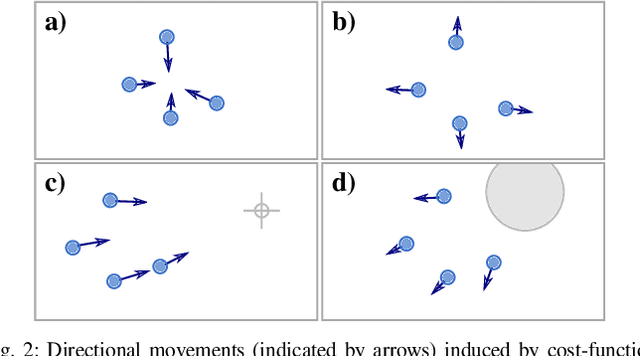
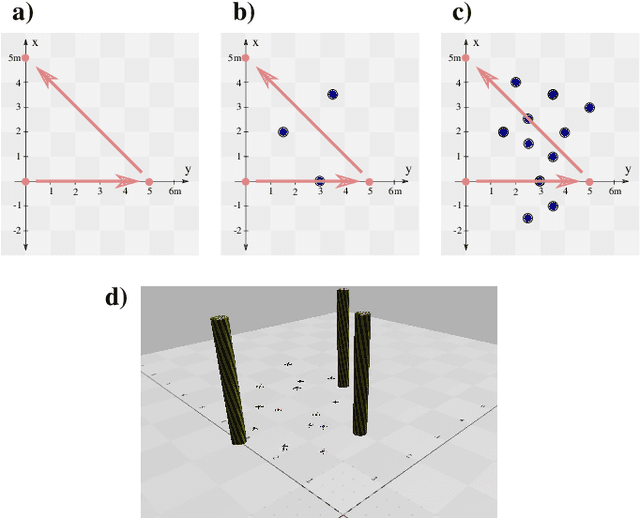
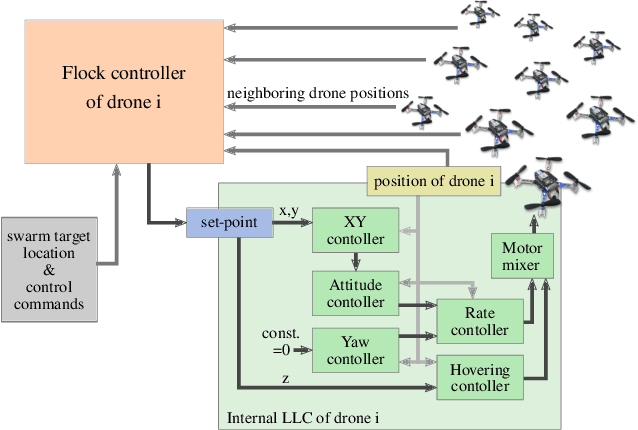
We introduce the novel concept of Spatial Predictive Control (SPC) to solve the following problem: given a collection of agents (e.g., drones) with positional low-level controllers (LLCs) and a mission-specific distributed cost function, how can a distributed controller achieve and maintain cost-function minimization without a plant model and only positional observations of the environment? Our fully distributed SPC controller is based strictly on the position of the agent itself and on those of its neighboring agents. This information is used in every time-step to compute the gradient of the cost function and to perform a spatial look-ahead to predict the best next target position for the LLC. Using a high-fidelity simulation environment, we show that SPC outperforms the most closely related class of controllers, Potential Field Controllers, on the drone flocking problem. We also show that SPC is able to cope with a potential sim-to-real transfer gap by demonstrating its performance on real hardware, namely our implementation of flocking using nine Crazyflie 2.1 drones.
Runtime-Assured, Real-Time Neural Control of Microgrids
Feb 20, 2022
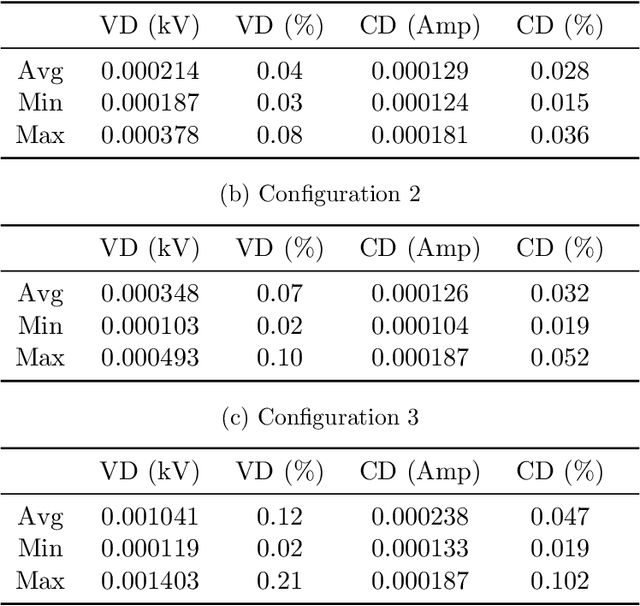

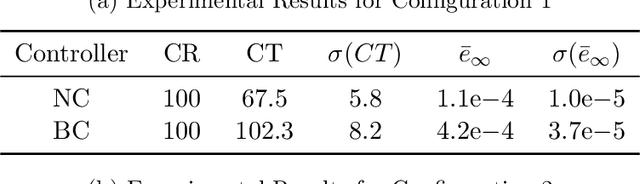
We present SimpleMG, a new, provably correct design methodology for runtime assurance of microgrids (MGs) with neural controllers. Our approach is centered around the Neural Simplex Architecture, which in turn is based on Sha et al.'s Simplex Control Architecture. Reinforcement Learning is used to synthesize high-performance neural controllers for MGs. Barrier Certificates are used to establish SimpleMG's runtime-assurance guarantees. We present a novel method to derive the condition for switching from the unverified neural controller to the verified-safe baseline controller, and we prove that the method is correct. We conduct an extensive experimental evaluation of SimpleMG using RTDS, a high-fidelity, real-time simulation environment for power systems, on a realistic model of a microgrid comprising three distributed energy resources (battery, photovoltaic, and diesel generator). Our experiments confirm that SimpleMG can be used to develop high-performance neural controllers for complex microgrids while assuring runtime safety, even in the presence of adversarial input attacks on the neural controller. Our experiments also demonstrate the benefits of online retraining of the neural controller while the baseline controller is in control
On The Verification of Neural ODEs with Stochastic Guarantees
Dec 16, 2020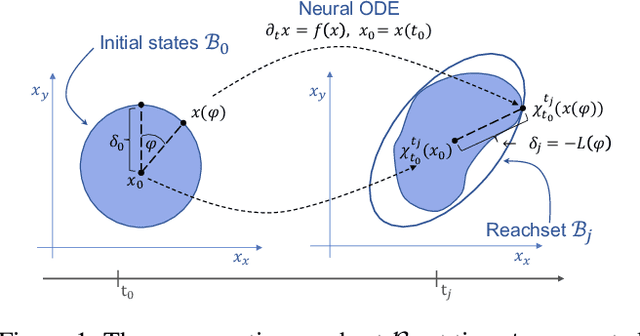
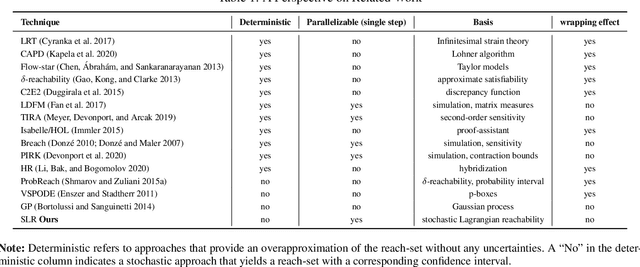
We show that Neural ODEs, an emerging class of time-continuous neural networks, can be verified by solving a set of global-optimization problems. For this purpose, we introduce Stochastic Lagrangian Reachability (SLR), an abstraction-based technique for constructing a tight Reachtube (an over-approximation of the set of reachable states over a given time-horizon), and provide stochastic guarantees in the form of confidence intervals for the Reachtube bounds. SLR inherently avoids the infamous wrapping effect (accumulation of over-approximation errors) by performing local optimization steps to expand safe regions instead of repeatedly forward-propagating them as is done by deterministic reachability methods. To enable fast local optimizations, we introduce a novel forward-mode adjoint sensitivity method to compute gradients without the need for backpropagation. Finally, we establish asymptotic and non-asymptotic convergence rates for SLR.
Lagrangian Reachtubes: The Next Generation
Dec 14, 2020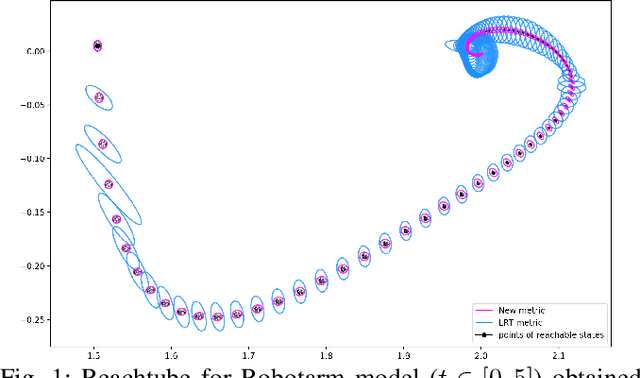
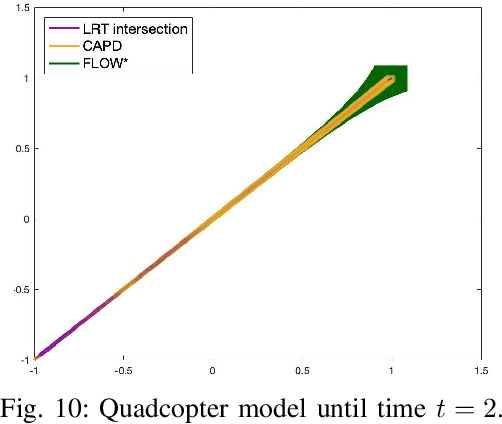
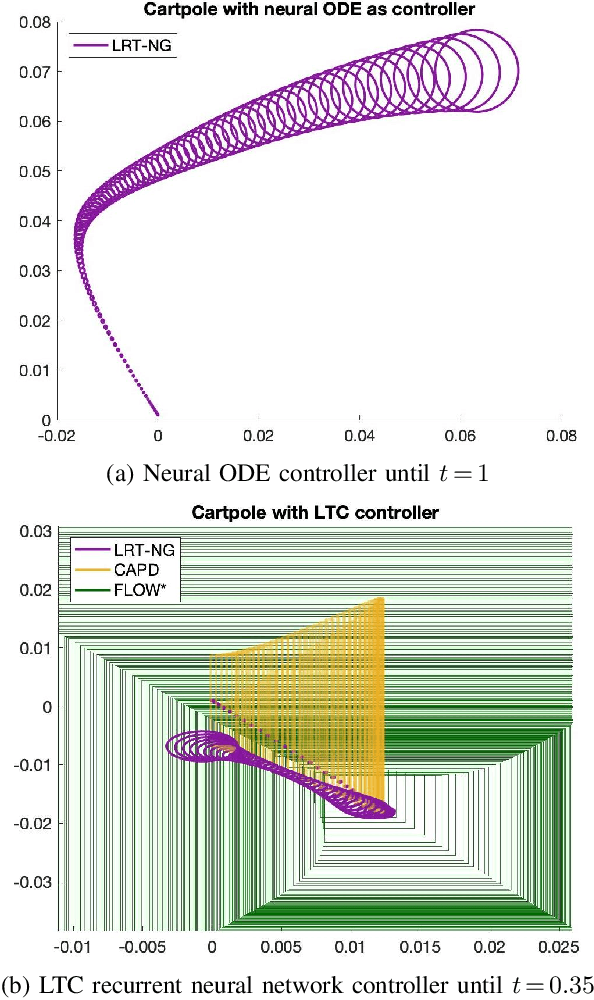
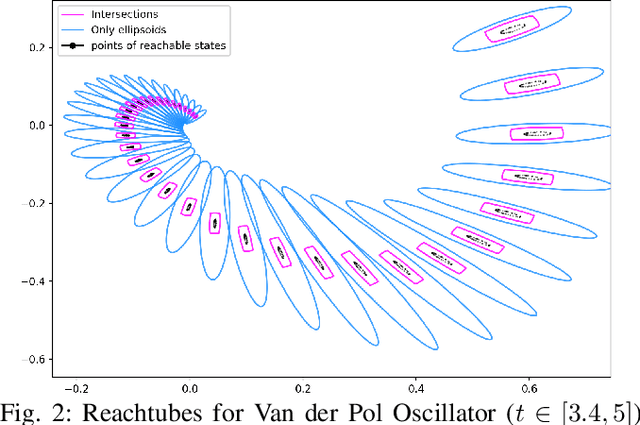
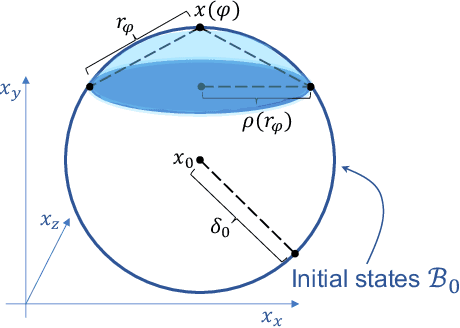
We introduce LRT-NG, a set of techniques and an associated toolset that computes a reachtube (an over-approximation of the set of reachable states over a given time horizon) of a nonlinear dynamical system. LRT-NG significantly advances the state-of-the-art Langrangian Reachability and its associated tool LRT. From a theoretical perspective, LRT-NG is superior to LRT in three ways. First, it uses for the first time an analytically computed metric for the propagated ball which is proven to minimize the ball's volume. We emphasize that the metric computation is the centerpiece of all bloating-based techniques. Secondly, it computes the next reachset as the intersection of two balls: one based on the Cartesian metric and the other on the new metric. While the two metrics were previously considered opposing approaches, their joint use considerably tightens the reachtubes. Thirdly, it avoids the "wrapping effect" associated with the validated integration of the center of the reachset, by optimally absorbing the interval approximation in the radius of the next ball. From a tool-development perspective, LRT-NG is superior to LRT in two ways. First, it is a standalone tool that no longer relies on CAPD. This required the implementation of the Lohner method and a Runge-Kutta time-propagation method. Secondly, it has an improved interface, allowing the input model and initial conditions to be provided as external input files. Our experiments on a comprehensive set of benchmarks, including two Neural ODEs, demonstrates LRT-NG's superior performance compared to LRT, CAPD, and Flow*.
MPC-guided Imitation Learning of Neural Network Policies for the Artificial Pancreas
Mar 03, 2020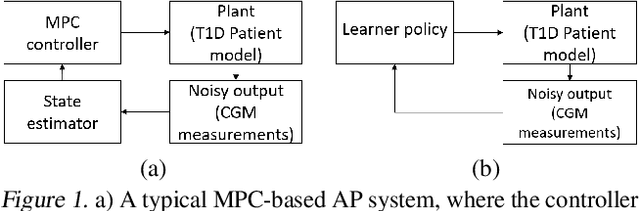
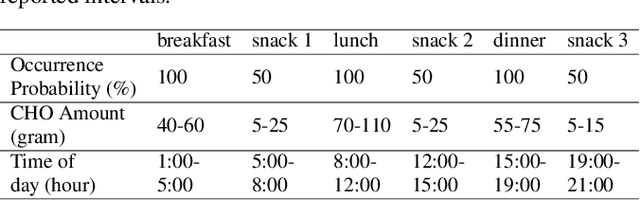
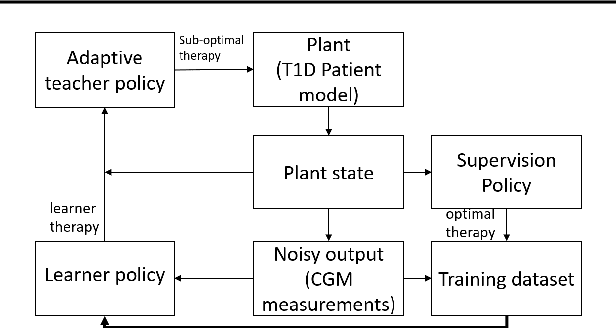
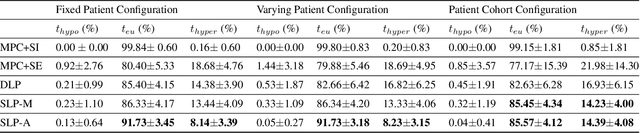
Even though model predictive control (MPC) is currently the main algorithm for insulin control in the artificial pancreas (AP), it usually requires complex online optimizations, which are infeasible for resource-constrained medical devices. MPC also typically relies on state estimation, an error-prone process. In this paper, we introduce a novel approach to AP control that uses Imitation Learning to synthesize neural-network insulin policies from MPC-computed demonstrations. Such policies are computationally efficient and, by instrumenting MPC at training time with full state information, they can directly map measurements into optimal therapy decisions, thus bypassing state estimation. We apply Bayesian inference via Monte Carlo Dropout to learn policies, which allows us to quantify prediction uncertainty and thereby derive safer therapy decisions. We show that our control policies trained under a specific patient model readily generalize (in terms of model parameters and disturbance distributions) to patient cohorts, consistently outperforming traditional MPC with state estimation.
Neural Simplex Architecture
Aug 01, 2019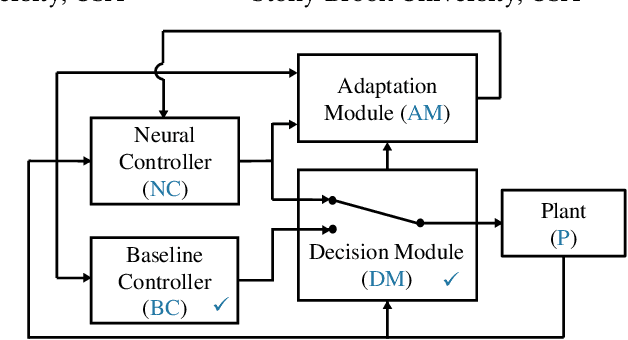
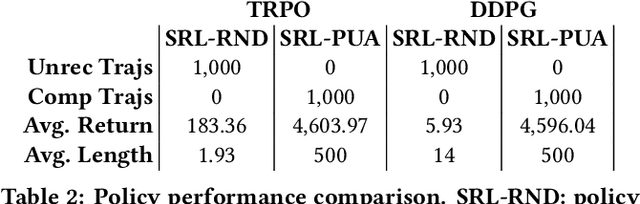
We present the Neural Simplex Architecture (NSA), a new approach to runtime assurance that provides safety guarantees for neural controllers (obtained e.g. using reinforcement learning) of complex autonomous and other cyber-physical systems without unduly sacrificing performance. NSA is inspired by the Simplex control architecture of Sha et al., but with some significant differences. In the traditional Simplex approach, the advanced controller (AC) is treated as a black box; there are no techniques for correcting the AC after it generates a potentially unsafe control input that causes a failover to the BC. Our NSA addresses this limitation. NSA not only provides safety assurances for CPSs in the presence of a possibly faulty neural controller, but can also improve the safety of such a controller in an online setting via retraining, without degrading its performance. NSA also offers reverse switching strategies, which allow the AC to resume control of the system under reasonable conditions, allowing the mission to continue unabated. Our experimental results on several significant case studies, including a target-seeking ground rover navigating an obstacle field and a neural controller for an artificial pancreas system, demonstrate NSA's benefits.
Neural State Classification for Hybrid Systems
Jul 26, 2018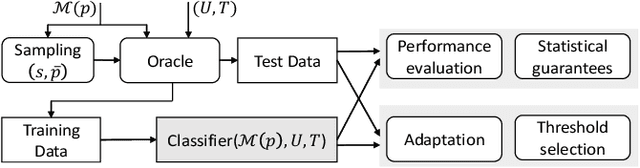
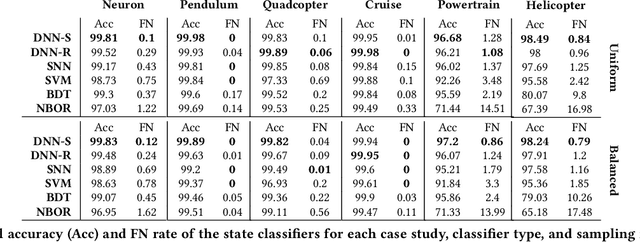
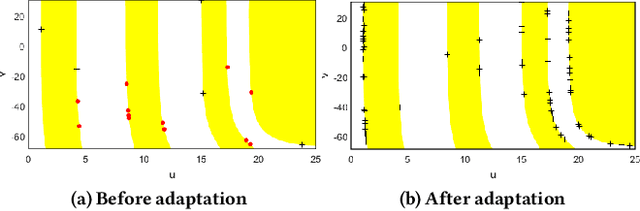
We introduce the State Classification Problem (SCP) for hybrid systems, and present Neural State Classification (NSC) as an efficient solution technique. SCP generalizes the model checking problem as it entails classifying each state $s$ of a hybrid automaton as either positive or negative, depending on whether or not $s$ satisfies a given time-bounded reachability specification. This is an interesting problem in its own right, which NSC solves using machine-learning techniques, Deep Neural Networks in particular. State classifiers produced by NSC tend to be very efficient (run in constant time and space), but may be subject to classification errors. To quantify and mitigate such errors, our approach comprises: i) techniques for certifying, with statistical guarantees, that an NSC classifier meets given accuracy levels; ii) tuning techniques, including a novel technique based on adversarial sampling, that can virtually eliminate false negatives (positive states classified as negative), thereby making the classifier more conservative. We have applied NSC to six nonlinear hybrid system benchmarks, achieving an accuracy of 99.25% to 99.98%, and a false-negative rate of 0.0033 to 0, which we further reduced to 0.0015 to 0 after tuning the classifier. We believe that this level of accuracy is acceptable in many practical applications, and that these results demonstrate the promise of the NSC approach.
How to Learn a Model Checker
Dec 05, 2017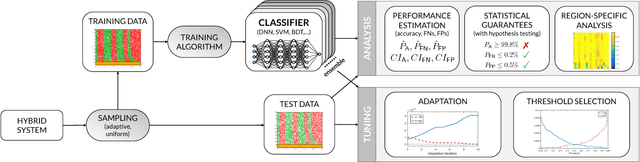
We show how machine-learning techniques, particularly neural networks, offer a very effective and highly efficient solution to the approximate model-checking problem for continuous and hybrid systems, a solution where the general-purpose model checker is replaced by a model-specific classifier trained by sampling model trajectories. To the best of our knowledge, we are the first to establish this link from machine learning to model checking. Our method comprises a pipeline of analysis techniques for estimating and obtaining statistical guarantees on the classifier's prediction performance, as well as tuning techniques to improve such performance. Our experimental evaluation considers the time-bounded reachability problem for three well-established benchmarks in the hybrid systems community. On these examples, we achieve an accuracy of 99.82% to 100% and a false-negative rate (incorrectly predicting that unsafe states are not reachable from a given state) of 0.0007 to 0. We believe that this level of accuracy is acceptable in many practical applications and we show how the approximate model checker can be made more conservative by tuning the classifier through further training and selection of the classification threshold.
ARES: Adaptive Receding-Horizon Synthesis of Optimal Plans
Dec 21, 2016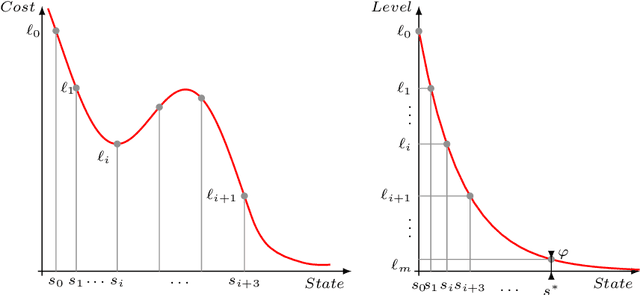
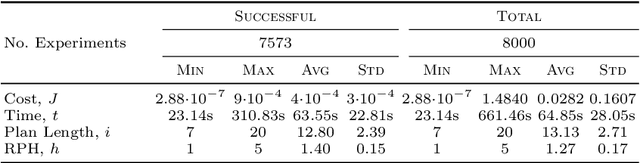
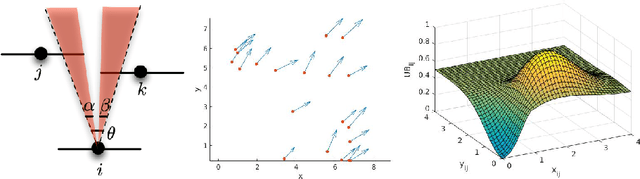
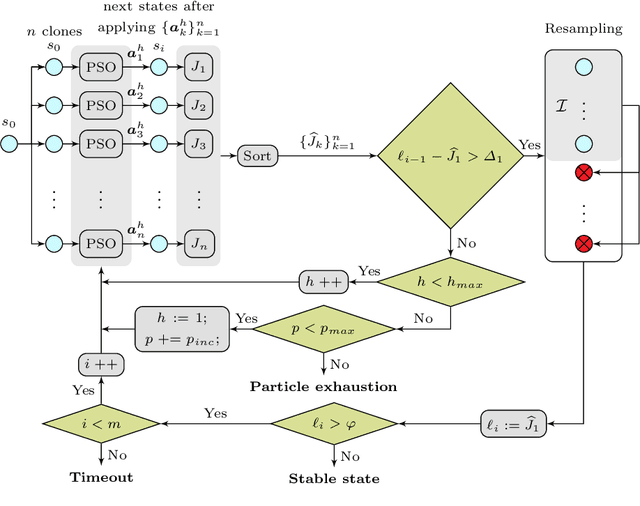
We introduce ARES, an efficient approximation algorithm for generating optimal plans (action sequences) that take an initial state of a Markov Decision Process (MDP) to a state whose cost is below a specified (convergence) threshold. ARES uses Particle Swarm Optimization, with adaptive sizing for both the receding horizon and the particle swarm. Inspired by Importance Splitting, the length of the horizon and the number of particles are chosen such that at least one particle reaches a next-level state, that is, a state where the cost decreases by a required delta from the previous-level state. The level relation on states and the plans constructed by ARES implicitly define a Lyapunov function and an optimal policy, respectively, both of which could be explicitly generated by applying ARES to all states of the MDP, up to some topological equivalence relation. We also assess the effectiveness of ARES by statistically evaluating its rate of success in generating optimal plans. The ARES algorithm resulted from our desire to clarify if flying in V-formation is a flocking policy that optimizes energy conservation, clear view, and velocity alignment. That is, we were interested to see if one could find optimal plans that bring a flock from an arbitrary initial state to a state exhibiting a single connected V-formation. For flocks with 7 birds, ARES is able to generate a plan that leads to a V-formation in 95% of the 8,000 random initial configurations within 63 seconds, on average. ARES can also be easily customized into a model-predictive controller (MPC) with an adaptive receding horizon and statistical guarantees of convergence. To the best of our knowledge, our adaptive-sizing approach is the first to provide convergence guarantees in receding-horizon techniques.
A survey on unmanned aerial vehicle collision avoidance systems
Aug 31, 2015Collision avoidance is a key factor in enabling the integration of unmanned aerial vehicle into real life use, whether it is in military or civil application. For a long time there have been a large number of works to address this problem; therefore a comparative summary of them would be desirable. This paper presents a survey on the major collision avoidance systems developed in up to date publications. Each collision avoidance system contains two main parts: sensing and detection, and collision avoidance. Based on their characteristics each part is divided into different categories; and those categories are explained, compared and discussed about advantages and disadvantages in this paper.