 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Simplex Architecture
Aug 01, 2019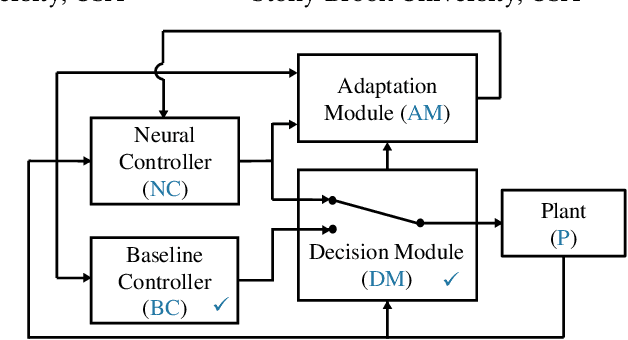
We present the Neural Simplex Architecture (NSA), a new approach to runtime assurance that provides safety guarantees for neural controllers (obtained e.g. using reinforcement learning) of complex autonomous and other cyber-physical systems without unduly sacrificing performance. NSA is inspired by the Simplex control architecture of Sha et al., but with some significant differences. In the traditional Simplex approach, the advanced controller (AC) is treated as a black box; there are no techniques for correcting the AC after it generates a potentially unsafe control input that causes a failover to the BC. Our NSA addresses this limitation. NSA not only provides safety assurances for CPSs in the presence of a possibly faulty neural controller, but can also improve the safety of such a controller in an online setting via retraining, without degrading its performance. NSA also offers reverse switching strategies, which allow the AC to resume control of the system under reasonable conditions, allowing the mission to continue unabated. Our experimental results on several significant case studies, including a target-seeking ground rover navigating an obstacle field and a neural controller for an artificial pancreas system, demonstrate NSA's benefits.
Neural State Classification for Hybrid Systems
Jul 26, 2018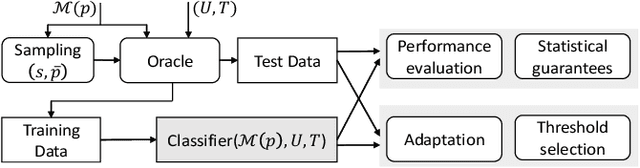
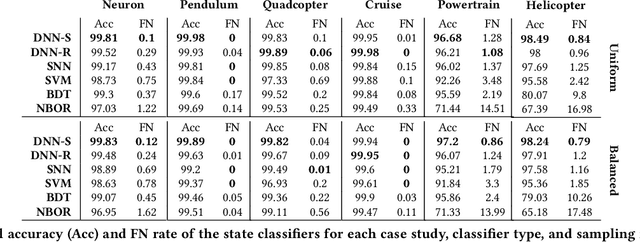
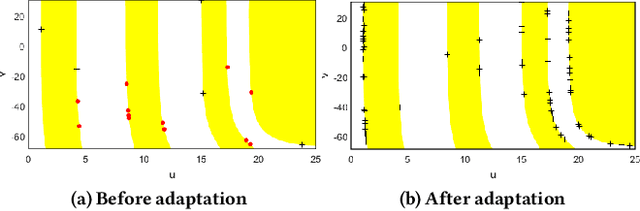
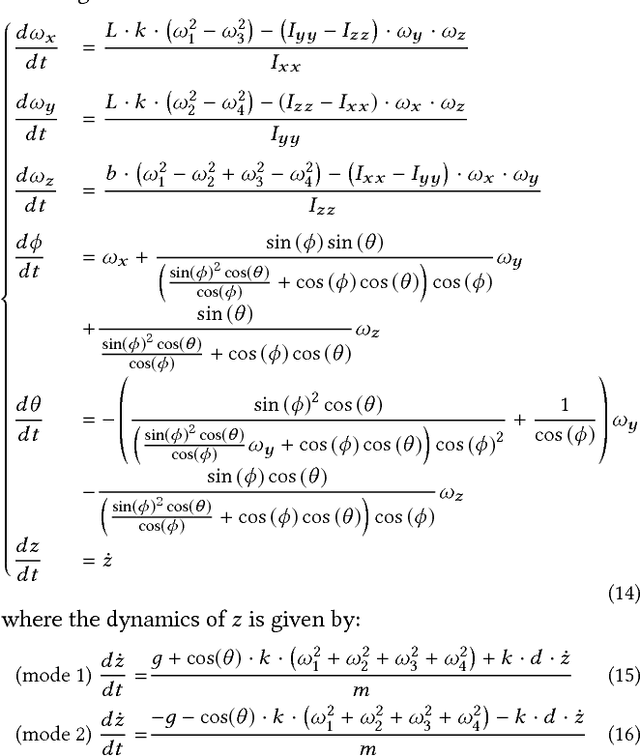
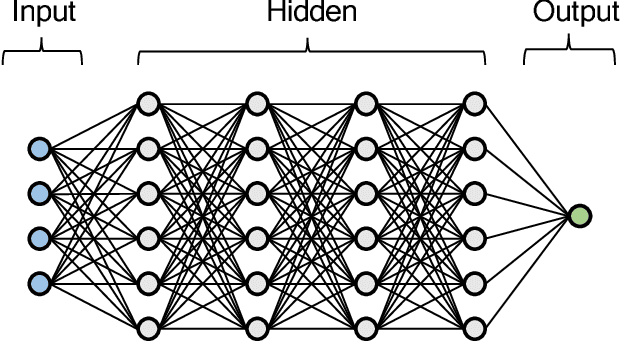
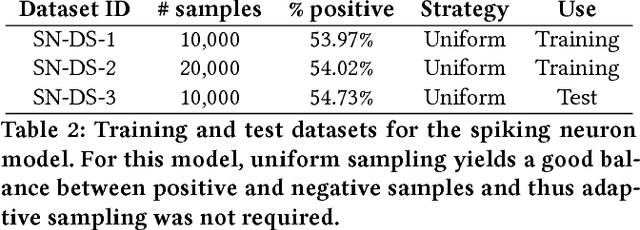
We introduce the State Classification Problem (SCP) for hybrid systems, and present Neural State Classification (NSC) as an efficient solution technique. SCP generalizes the model checking problem as it entails classifying each state $s$ of a hybrid automaton as either positive or negative, depending on whether or not $s$ satisfies a given time-bounded reachability specification. This is an interesting problem in its own right, which NSC solves using machine-learning techniques, Deep Neural Networks in particular. State classifiers produced by NSC tend to be very efficient (run in constant time and space), but may be subject to classification errors. To quantify and mitigate such errors, our approach comprises: i) techniques for certifying, with statistical guarantees, that an NSC classifier meets given accuracy levels; ii) tuning techniques, including a novel technique based on adversarial sampling, that can virtually eliminate false negatives (positive states classified as negative), thereby making the classifier more conservative. We have applied NSC to six nonlinear hybrid system benchmarks, achieving an accuracy of 99.25% to 99.98%, and a false-negative rate of 0.0033 to 0, which we further reduced to 0.0015 to 0 after tuning the classifier. We believe that this level of accuracy is acceptable in many practical applications, and that these results demonstrate the promise of the NSC approach.
How to Learn a Model Checker
Dec 05, 2017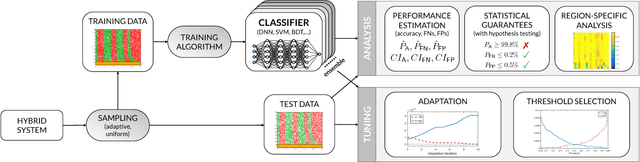
We show how machine-learning techniques, particularly neural networks, offer a very effective and highly efficient solution to the approximate model-checking problem for continuous and hybrid systems, a solution where the general-purpose model checker is replaced by a model-specific classifier trained by sampling model trajectories. To the best of our knowledge, we are the first to establish this link from machine learning to model checking. Our method comprises a pipeline of analysis techniques for estimating and obtaining statistical guarantees on the classifier's prediction performance, as well as tuning techniques to improve such performance. Our experimental evaluation considers the time-bounded reachability problem for three well-established benchmarks in the hybrid systems community. On these examples, we achieve an accuracy of 99.82% to 100% and a false-negative rate (incorrectly predicting that unsafe states are not reachable from a given state) of 0.0007 to 0. We believe that this level of accuracy is acceptable in many practical applications and we show how the approximate model checker can be made more conservative by tuning the classifier through further training and selection of the classification threshold.
A survey on unmanned aerial vehicle collision avoidance systems
Aug 31, 2015Collision avoidance is a key factor in enabling the integration of unmanned aerial vehicle into real life use, whether it is in military or civil application. For a long time there have been a large number of works to address this problem; therefore a comparative summary of them would be desirable. This paper presents a survey on the major collision avoidance systems developed in up to date publications. Each collision avoidance system contains two main parts: sensing and detection, and collision avoidance. Based on their characteristics each part is divided into different categories; and those categories are explained, compared and discussed about advantages and disadvantages in this paper.