 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Autonomous In-situ Soil Sampling and Mapping in Large-Scale Agricultural Environments
Jun 06, 2025Traditional soil sampling and analysis methods are labor-intensive, time-consuming, and limited in spatial resolution, making them unsuitable for large-scale precision agriculture. To address these limitations, we present a robotic solution for real-time sampling, analysis and mapping of key soil properties. Our system consists of two main sub-systems: a Sample Acquisition System (SAS) for precise, automated in-field soil sampling; and a Sample Analysis Lab (Lab) for real-time soil property analysis. The system's performance was validated through extensive field trials at a large-scale Australian farm. Experimental results show that the SAS can consistently acquire soil samples with a mass of 50g at a depth of 200mm, while the Lab can process each sample within 10 minutes to accurately measure pH and macronutrients. These results demonstrate the potential of the system to provide farmers with timely, data-driven insights for more efficient and sustainable soil management and fertilizer application.
Automated Testing of Spatially-Dependent Environmental Hypotheses through Active Transfer Learning
Mar 07, 2024The efficient collection of samples is an important factor in outdoor information gathering applications on account of high sampling costs such as time, energy, and potential destruction to the environment. Utilization of available a-priori data can be a powerful tool for increasing efficiency. However, the relationships of this data with the quantity of interest are often not known ahead of time, limiting the ability to leverage this knowledge for improved planning efficiency. To this end, this work combines transfer learning and active learning through a Multi-Task Gaussian Process and an information-based objective function. Through this combination it can explore the space of hypothetical inter-quantity relationships and evaluate these hypotheses in real-time, allowing this new knowledge to be immediately exploited for future plans. The performance of the proposed method is evaluated against synthetic data and is shown to evaluate multiple hypotheses correctly. Its effectiveness is also demonstrated on real datasets. The technique is able to identify and leverage hypotheses which show a medium or strong correlation to reduce prediction error by a factor of 1.4--3.4 within the first 7 samples, and poor hypotheses are quickly identified and rejected eventually having no adverse effect.
Manipulating UAV Imagery for Satellite Model Training, Calibration and Testing
Mar 22, 2022
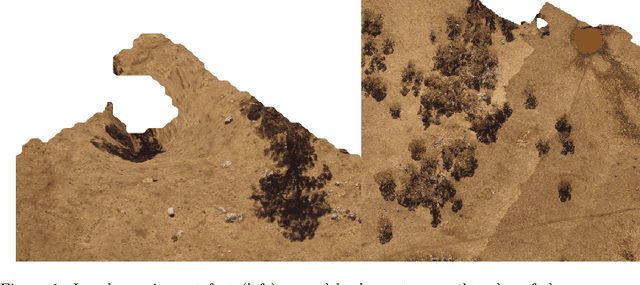
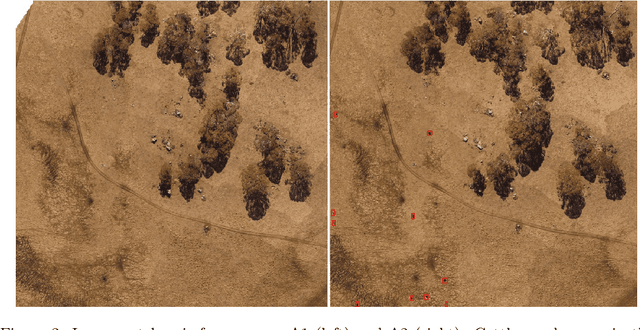

Modern livestock farming is increasingly data driven and frequently relies on efficient remote sensing to gather data over wide areas. High resolution satellite imagery is one such data source, which is becoming more accessible for farmers as coverage increases and cost falls. Such images can be used to detect and track animals, monitor pasture changes, and understand land use. Many of the data driven models being applied to these tasks require ground truthing at resolutions higher than satellites can provide. Simultaneously, there is a lack of available aerial imagery focused on farmland changes that occur over days or weeks, such as herd movement. With this goal in mind, we present a new multi-temporal dataset of high resolution UAV imagery which is artificially degraded to match satellite data quality. An empirical blurring metric is used to calibrate the degradation process against actual satellite imagery of the area. UAV surveys were flown repeatedly over several weeks, for specific farm locations. This 5cm/pixel data is sufficiently high resolution to accurately ground truth cattle locations, and other factors such as grass cover. From 33 wide area UAV surveys, 1869 patches were extracted and artificially degraded using an accurate satellite optical model to simulate satellite data. Geographic patches from multiple time periods are aligned and presented as sets, providing a multi-temporal dataset that can be used for detecting changes on farms. The geo-referenced images and 27,853 manually annotated cattle labels are made publicly available.
Automated Aerial Animal Detection When Spatial Resolution Conditions Are Varied
Oct 04, 2021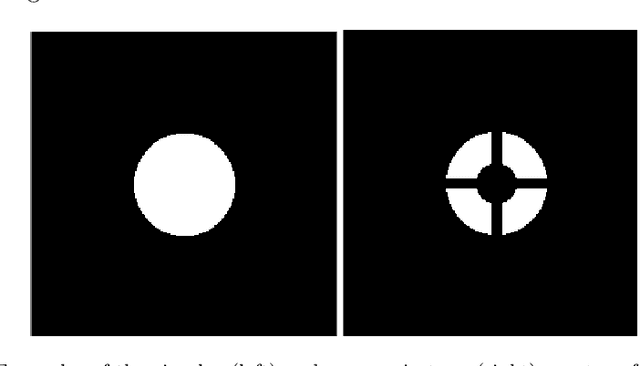
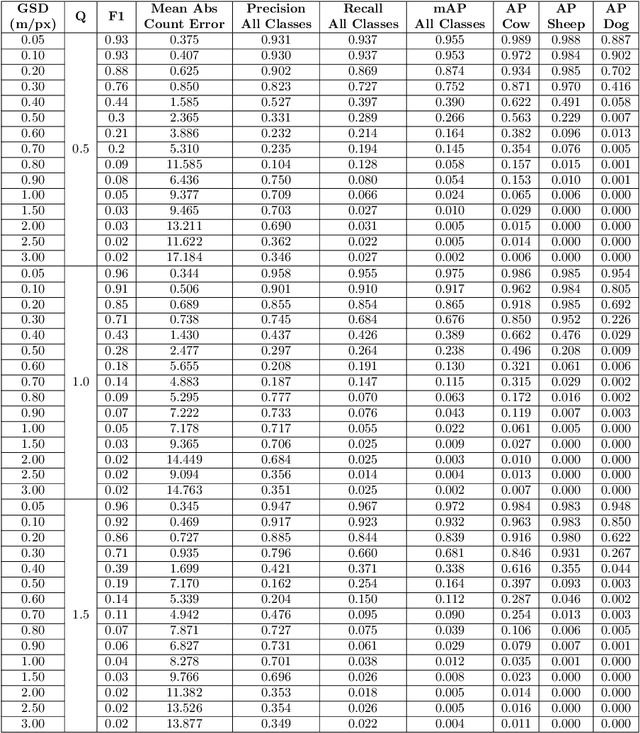
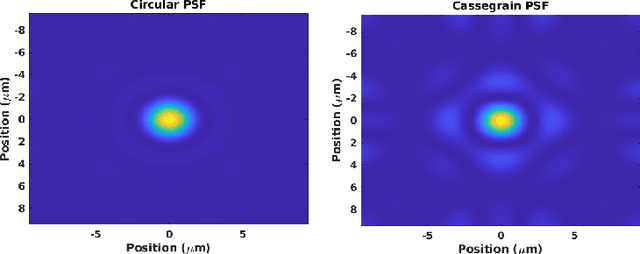
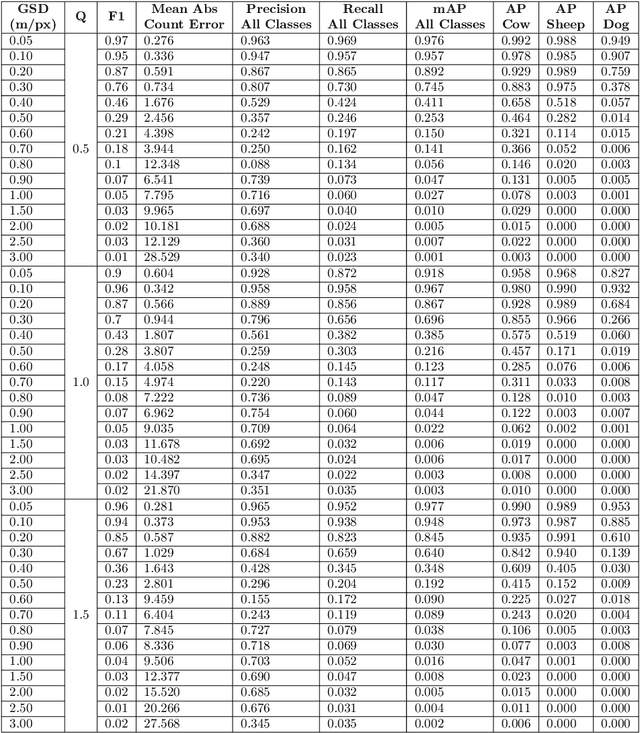
Knowing where livestock are located enables optimized management and mustering. However, Australian farms are large meaning that many of Australia's livestock are unmonitored which impacts farm profit, animal welfare and the environment. Effective animal localisation and counting by analysing satellite imagery overcomes this management hurdle however, high resolution satellite imagery is expensive. Thus, to minimise cost the lowest spatial resolution data that enables accurate livestock detection should be selected. In our work, we determine the association between object detector performance and spatial degradation for cattle, sheep and dogs. Accurate ground truth was established using high resolution drone images which were then downsampled to various ground sample distances (GSDs). Both circular and cassegrain aperture optics were simulated to generate point spread functions (PSFs) corresponding to various optical qualities. By simulating the PSF, rather than approximating it as a Gaussian, the images were accurately degraded to match the spatial resolution and blurring structure of satellite imagery. Two existing datasets were combined and used to train and test a YoloV5 object detection network. Detector performance was found to drop steeply around a GSD of 0.5m/px and was associated with PSF matrix structure within this GSD region. Detector mAP performance fell by 52 percent when a cassegrain, rather than circular, aperture was used at a 0.5m/px GSD. Overall blurring magnitude also had a small impact when matched to GSD, as did the internal network resolution. Our results here inform the selection of remote sensing data requirements for animal detection tasks, allowing farmers and ecologists to use more accessible medium resolution imagery with confidence.
Active Information Acquisition under Arbitrary Unknown Disturbances
Sep 19, 2021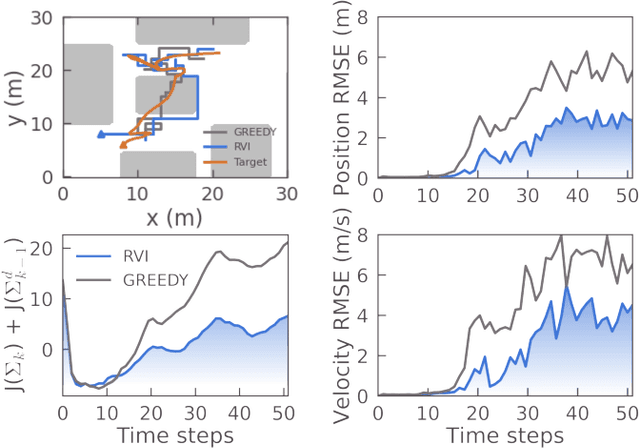
Trajectory optimization of sensing robots to actively gather information of targets has received much attention in the past. It is well-known that under the assumption of linear Gaussian target dynamics and sensor models the stochastic Active Information Acquisition problem is equivalent to a deterministic optimal control problem. However, the above-mentioned assumptions regarding the target dynamic model are limiting. In real-world scenarios, the target may be subject to disturbances whose models or statistical properties are hard or impossible to obtain. Typical scenarios include abrupt maneuvers, jumping disturbances due to interactions with the environment, anomalous misbehaviors due to system faults/attacks, etc. Motivated by the above considerations, in this paper we consider targets whose dynamic models are subject to arbitrary unknown inputs whose models or statistical properties are not assumed to be available. In particular, with the aid of an unknown input decoupled filter, we formulate the sensor trajectory planning problem to track evolution of the target state and analyse the resulting performance for both the state and unknown input evolution tracking. Inspired by concepts of Reduced Value Iteration, a suboptimal solution that expands a search tree via Forward Value Iteration with informativeness-based pruning is proposed. Concrete suboptimality performance guarantees for tracking both the state and the unknown input are established. Numerical simulations of a target tracking example are presented to compare the proposed solution with a greedy policy.
Experimental Evaluation of a Hierarchical Operating Framework for Ground Robots in Agriculture
May 23, 2021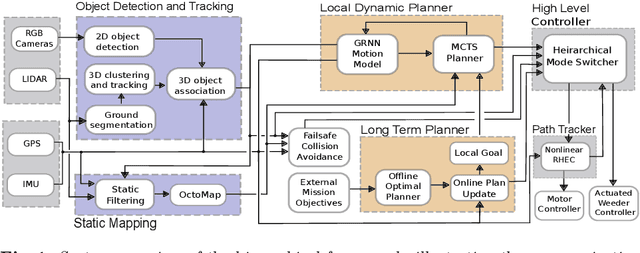
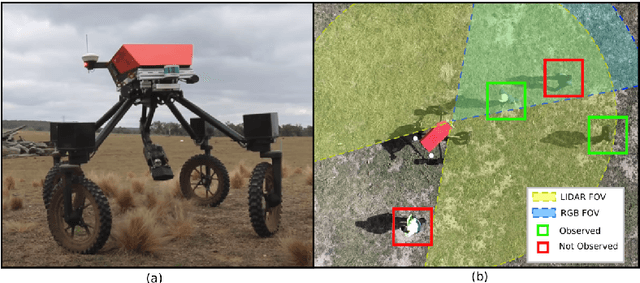
For mobile robots to be effectively applied to real world unstructured environments -- such as large scale farming -- they require the ability to generate adaptive plans that account both for limited onboard resources, and the presence of dynamic changes, including nearby moving individuals. This work provides a real world empirical evaluation of our proposed hierarchical framework for long-term autonomy of field robots, conducted on University of Sydney's Swagbot agricultural robot platform. We demonstrate the ability of the framework to navigate an unstructured and dynamic environment in an effective manner, validating its use for long-term deployment in large scale farming, for tasks such as autonomous weeding in the presence of moving individuals.
Resource and Response Aware Path Planning for Long-term Autonomy of Ground Robots in Agriculture
May 22, 2021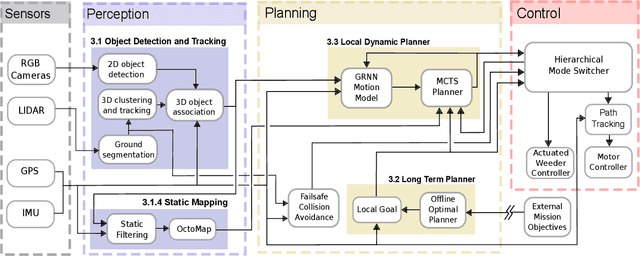
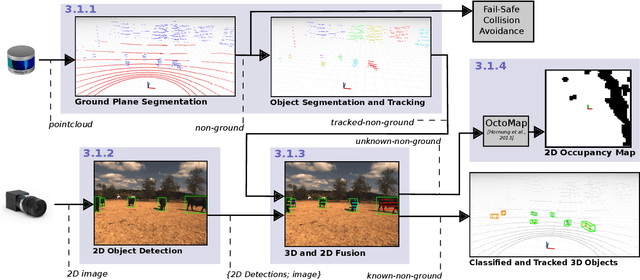
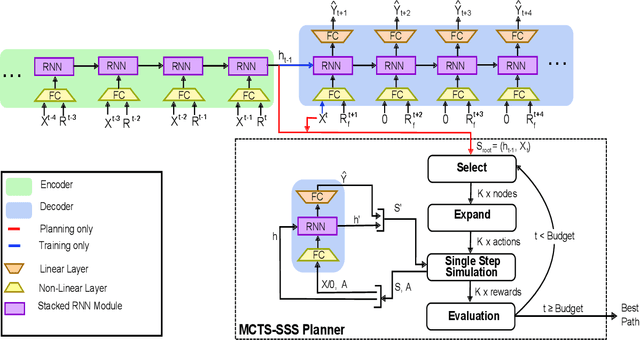
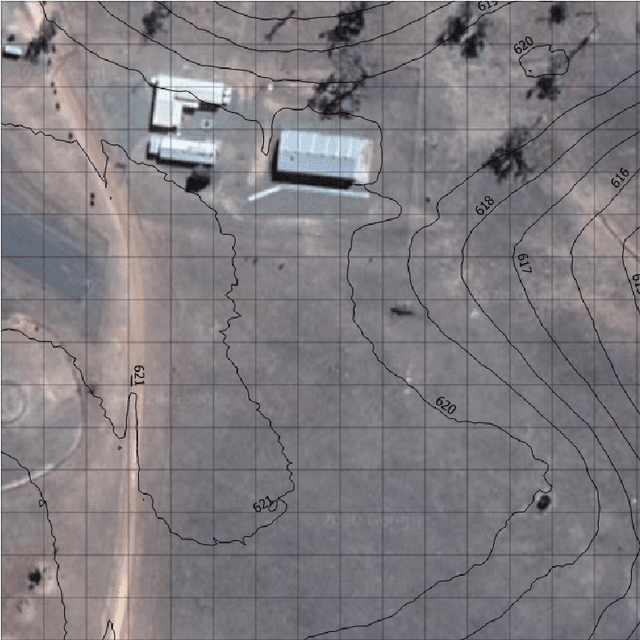
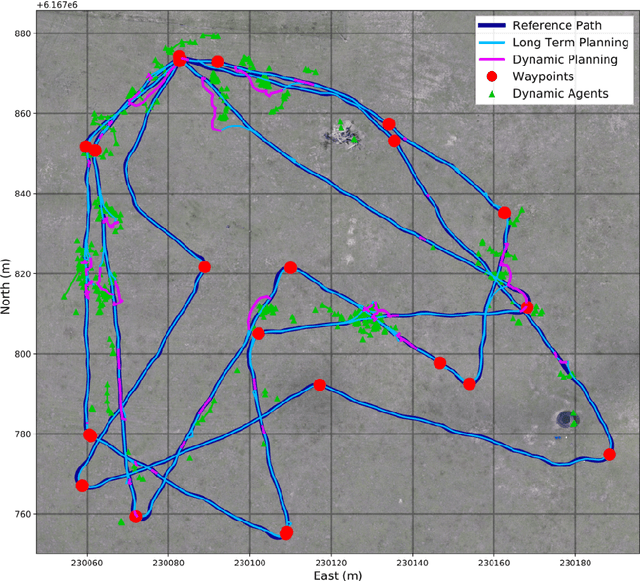
Achieving long-term autonomy for mobile robots operating in real-world unstructured environments such as farms remains a significant challenge. This is made increasingly complex in the presence of moving humans or livestock. These environments require a robot to be adaptive in its immediate plans, accounting for the state of nearby individuals and the response that they might have to the robot's actions. Additionally, in order to achieve longer-term goals, consideration of the limited on-board resources available to the robot is required, especially for extended missions such as weeding an agricultural field. To achieve efficient long-term autonomy, it is thus crucial to understand the impact that online dynamic updates to an energy efficient offline plan might have on resource usage whilst navigating through crowds or herds. To address these challenges, a hierarchical planning framework is proposed, integrating an online local dynamic path planner with an offline longer-term objective-based planner. This framework acts to achieve long-term autonomy through awareness of both dynamic responses of individuals to a robot's motion and the limited resources available. This paper details the hierarchical approach and its integration on a robotic platform, including a comprehensive description of the planning framework and associated perception modules. The approach is evaluated in real-world trials on farms, requiring both consideration of limited battery capacity and the presence of nearby moving individuals. These trials additionally demonstrate the ability of the framework to adapt resource use through variation of the local dynamic planner, allowing adaptive behaviour in changing environments. A summary video is available at https://youtu.be/DGVTrYwJ304.
Dataset and Performance Comparison of Deep Learning Architectures for Plum Detection and Robotic Harvesting
May 09, 2021

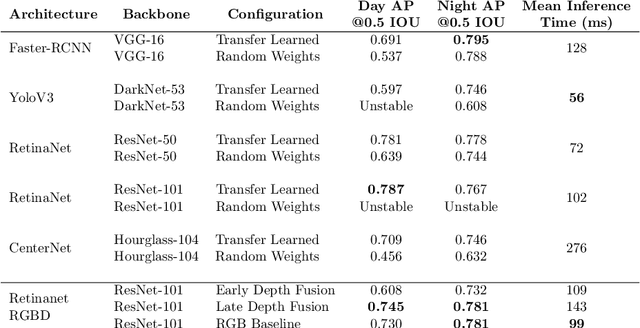
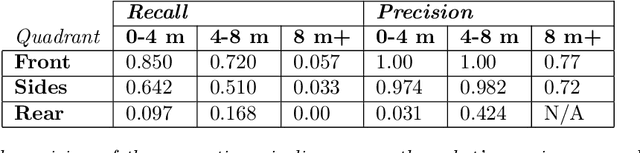
Many automated operations in agriculture, such as weeding and plant counting, require robust and accurate object detectors. Robotic fruit harvesting is one of these, and is an important technology to address the increasing labour shortages and uncertainty suffered by tree crop growers. An eye-in-hand sensing setup is commonly used in harvesting systems and provides benefits to sensing accuracy and flexibility. However, as the hand and camera move from viewing the entire trellis to picking a specific fruit, large changes in lighting, colour, obscuration and exposure occur. Object detection algorithms used in harvesting should be robust to these challenges, but few datasets for assessing this currently exist. In this work, two new datasets are gathered during day and night operation of an actual robotic plum harvesting system. A range of current generation deep learning object detectors are benchmarked against these. Additionally, two methods for fusing depth and image information are tested for their impact on detector performance. Significant differences between day and night accuracy of different detectors is found, transfer learning is identified as essential in all cases, and depth information fusion is assessed as only marginally effective. The dataset and benchmark models are made available online.
Design and Evaluation of a Modular Robotic Plum Harvesting System Utilising Soft Components
Jul 13, 2020



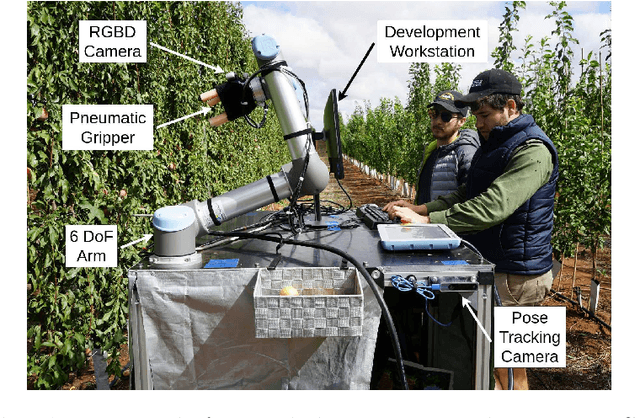
The human labour required for tree crop harvesting is a major cost component in fruit production and is increasing. To address this, many existing research works have sought to demonstrate commercially viable robotic harvesting for tree crops, though successful commercial products resulting from these have been few and far between. Systems developed for specific crops such as sweet peppers or apples have shown promise, but the vast majority of cultivar types remain unaddressed and developing a specific system for each one is inefficient. In this work a flexible and modular development platform is presented, this can be used to test specific design choices on different fruit and growing conditions. The system is evaluated in a commercial plum orchard, with no crop modifications. Some existing techniques are found to be counterproductive for plums, while soft robotics and persistent target tracking significantly improve performance. A harvest success rate of 42% was observed, with lower than expected effectiveness based on prior testing with apples. The plum type and growing style pose unique challenges which are examined in the context of system module design choices.
Probabilistic Crowd GAN: Multimodal Pedestrian Trajectory Prediction using a Graph Vehicle-Pedestrian Attention Network
Jul 12, 2020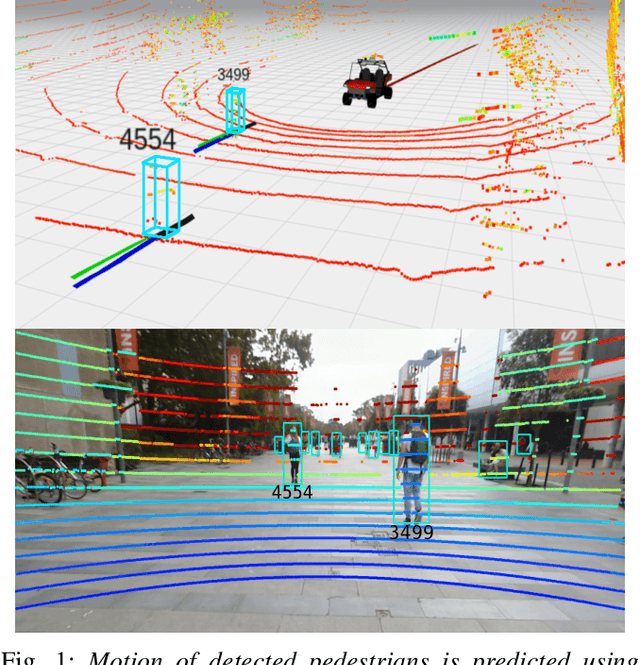
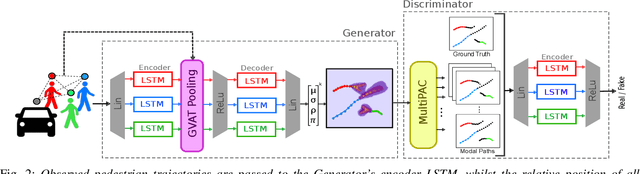

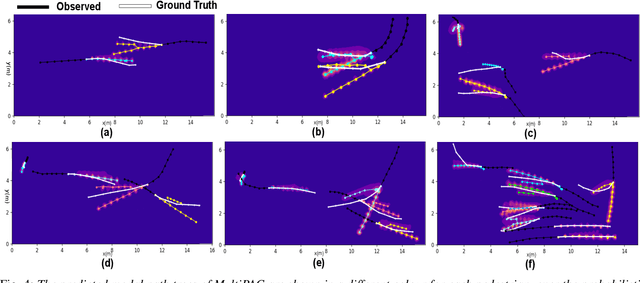
Understanding and predicting the intention of pedestrians is essential to enable autonomous vehicles and mobile robots to navigate crowds. This problem becomes increasingly complex when we consider the uncertainty and multimodality of pedestrian motion, as well as the implicit interactions between members of a crowd, including any response to a vehicle. Our approach, Probabilistic Crowd GAN, extends recent work in trajectory prediction, combining Recurrent Neural Networks (RNNs) with Mixture Density Networks (MDNs) to output probabilistic multimodal predictions, from which likely modal paths are found and used for adversarial training. We also propose the use of Graph Vehicle-Pedestrian Attention Network (GVAT), which models social interactions and allows input of a shared vehicle feature, showing that inclusion of this module leads to improved trajectory prediction both with and without the presence of a vehicle. Through evaluation on various datasets, we demonstrate improvements on the existing state of the art methods for trajectory prediction and illustrate how the true multimodal and uncertain nature of crowd interactions can be directly modelled.