 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Autonomous, End-to-End, Convex-Based Framework for Close-Range Rendezvous Trajectory Design and Guidance with Hardware Testbed Validation
Feb 12, 2026Autonomous satellite servicing missions must execute close-range rendezvous under stringent safety and operational constraints while remaining computationally tractable for onboard use and robust to uncertainty in sensing, actuation, and dynamics. This paper presents CORTEX (Convex Optimization for Rendezvous Trajectory Execution), an autonomous, perception-enabled, real-time trajectory design and guidance framework for close-range rendezvous. CORTEX integrates a deep-learning perception pipeline with convex-optimisation-based trajectory design and guidance, including reference regeneration and abort-to-safe-orbit logic to recover from large deviations caused by sensor faults and engine failures. CORTEX is validated in high-fidelity software simulation and hardware-in-the-loop experiments. The software pipeline (Basilisk) models high-fidelity relative dynamics, realistic thruster execution, perception, and attitude control. Hardware testing uses (i) an optical navigation testbed to assess perception-to-estimation performance and (ii) a planar air-bearing testbed to evaluate the end-to-end guidance loop under representative actuation and subsystem effects. A Monte-Carlo campaign in simulation includes initial-state uncertainty, thrust-magnitude errors, and missed-thrust events; under the strongest case investigated, CORTEX achieves terminal docking errors of $36.85 \pm 44.46$ mm in relative position and $1.25 \pm 2.26$ mm/s in relative velocity. On the planar air-bearing testbed, 18 cases are executed (10 nominal; 8 off-nominal requiring recomputation and/or abort due to simulated engine failure and sensor malfunctions), yielding terminal errors of $8.09 \pm 5.29$ mm in position and $2.23 \pm 1.72$ mm/s in velocity.
Experimental Evaluation of a Hierarchical Operating Framework for Ground Robots in Agriculture
May 23, 2021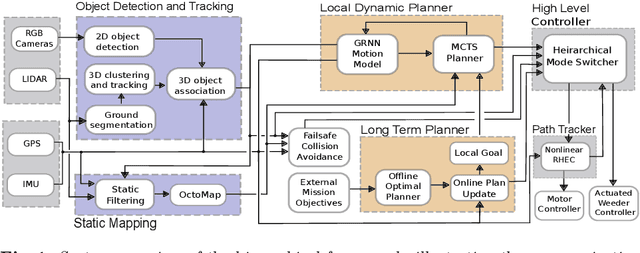
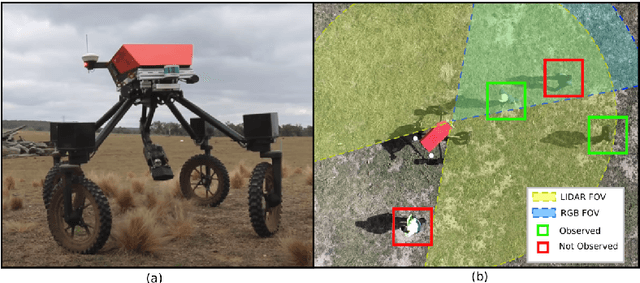
For mobile robots to be effectively applied to real world unstructured environments -- such as large scale farming -- they require the ability to generate adaptive plans that account both for limited onboard resources, and the presence of dynamic changes, including nearby moving individuals. This work provides a real world empirical evaluation of our proposed hierarchical framework for long-term autonomy of field robots, conducted on University of Sydney's Swagbot agricultural robot platform. We demonstrate the ability of the framework to navigate an unstructured and dynamic environment in an effective manner, validating its use for long-term deployment in large scale farming, for tasks such as autonomous weeding in the presence of moving individuals.
Resource and Response Aware Path Planning for Long-term Autonomy of Ground Robots in Agriculture
May 22, 2021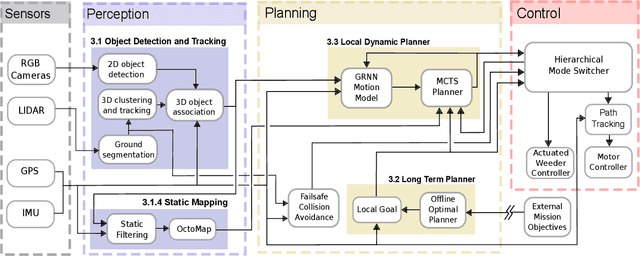
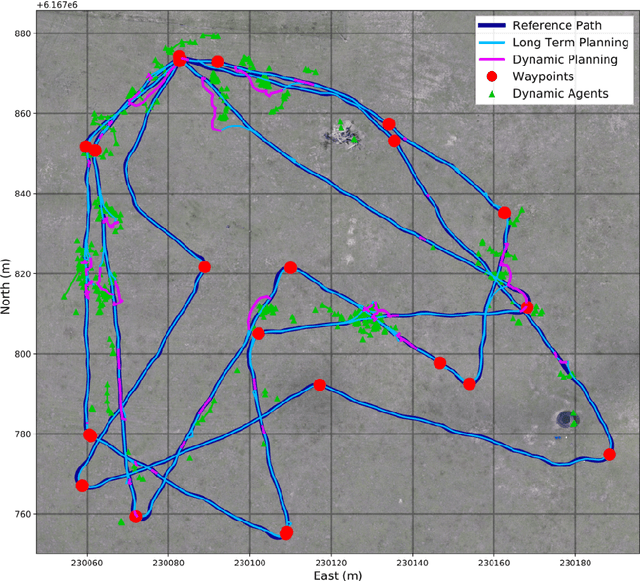
Achieving long-term autonomy for mobile robots operating in real-world unstructured environments such as farms remains a significant challenge. This is made increasingly complex in the presence of moving humans or livestock. These environments require a robot to be adaptive in its immediate plans, accounting for the state of nearby individuals and the response that they might have to the robot's actions. Additionally, in order to achieve longer-term goals, consideration of the limited on-board resources available to the robot is required, especially for extended missions such as weeding an agricultural field. To achieve efficient long-term autonomy, it is thus crucial to understand the impact that online dynamic updates to an energy efficient offline plan might have on resource usage whilst navigating through crowds or herds. To address these challenges, a hierarchical planning framework is proposed, integrating an online local dynamic path planner with an offline longer-term objective-based planner. This framework acts to achieve long-term autonomy through awareness of both dynamic responses of individuals to a robot's motion and the limited resources available. This paper details the hierarchical approach and its integration on a robotic platform, including a comprehensive description of the planning framework and associated perception modules. The approach is evaluated in real-world trials on farms, requiring both consideration of limited battery capacity and the presence of nearby moving individuals. These trials additionally demonstrate the ability of the framework to adapt resource use through variation of the local dynamic planner, allowing adaptive behaviour in changing environments. A summary video is available at https://youtu.be/DGVTrYwJ304.
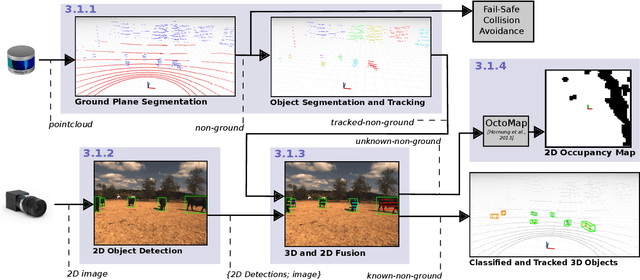
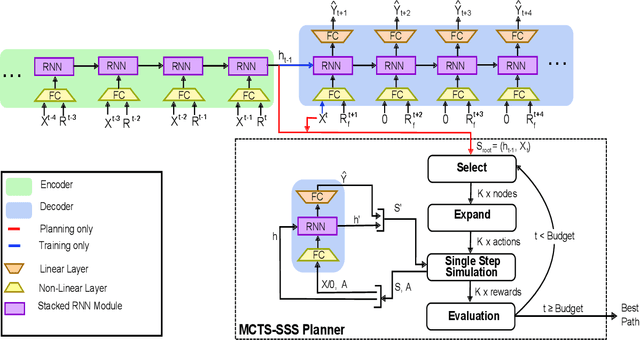
A Hierarchical Framework for Long-term and Robust Deployment of Field Ground Robots in Large-Scale Farming
Jun 24, 2020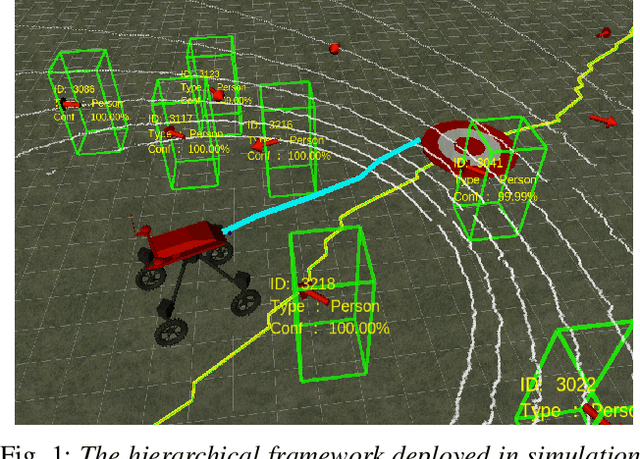
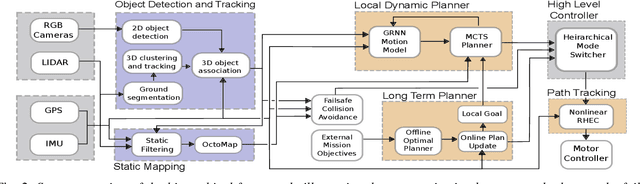
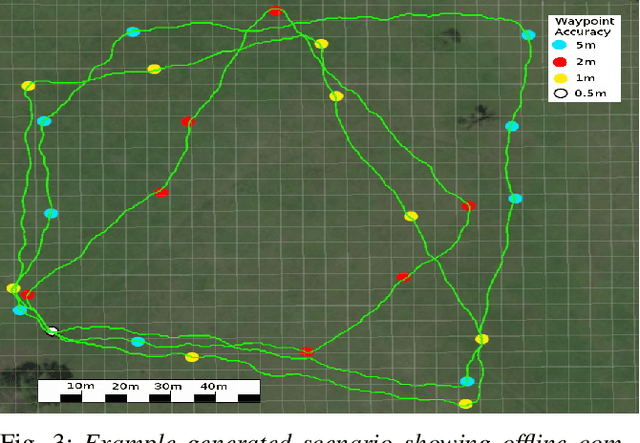
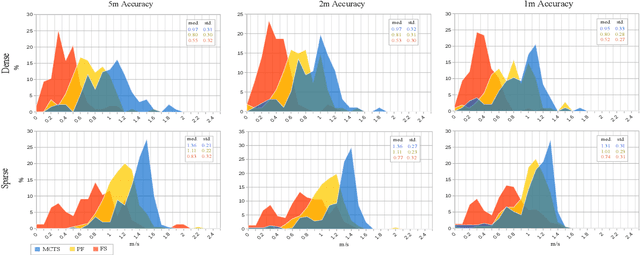
Achieving long term autonomy of robots operating in dynamic environments such as farms remains a significant challenge. Arguably, the most demanding factors to achieve this are the on-board resource constraints such as energy, planning in the presence of moving individuals such as livestock and people, and handling unknown and undulating terrain. These considerations require a robot to be adaptive in its immediate actions in order to successfully achieve long-term, resource-efficient and robust autonomy. To achieve this, we propose a hierarchical framework that integrates a local dynamic path planner with a longer term objective based planner and advanced motion control methods, whilst taking into consideration the dynamic responses of moving individuals within the environment. The framework is motivated by and synthesizes our recent work on energy aware mission planning, path planning in dynamic environments, and receding horizon motion control. In this paper we detail the proposed framework and outline its integration on a robotic platform. We evaluate the strategy in extensive simulated trials, traversing between objective waypoints to complete tasks such as soil sampling, weeding and recharging across a dynamic environment, demonstrating its capability to robustly adapt long term mission plans in the presence of moving individuals and obstacles for real world applications such as large scale farming.