 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Testing of Spatially-Dependent Environmental Hypotheses through Active Transfer Learning
Mar 07, 2024The efficient collection of samples is an important factor in outdoor information gathering applications on account of high sampling costs such as time, energy, and potential destruction to the environment. Utilization of available a-priori data can be a powerful tool for increasing efficiency. However, the relationships of this data with the quantity of interest are often not known ahead of time, limiting the ability to leverage this knowledge for improved planning efficiency. To this end, this work combines transfer learning and active learning through a Multi-Task Gaussian Process and an information-based objective function. Through this combination it can explore the space of hypothetical inter-quantity relationships and evaluate these hypotheses in real-time, allowing this new knowledge to be immediately exploited for future plans. The performance of the proposed method is evaluated against synthetic data and is shown to evaluate multiple hypotheses correctly. Its effectiveness is also demonstrated on real datasets. The technique is able to identify and leverage hypotheses which show a medium or strong correlation to reduce prediction error by a factor of 1.4--3.4 within the first 7 samples, and poor hypotheses are quickly identified and rejected eventually having no adverse effect.
Receding horizon estimation and control with structured noise blocking for mobile robot slip compensation
Oct 10, 2018

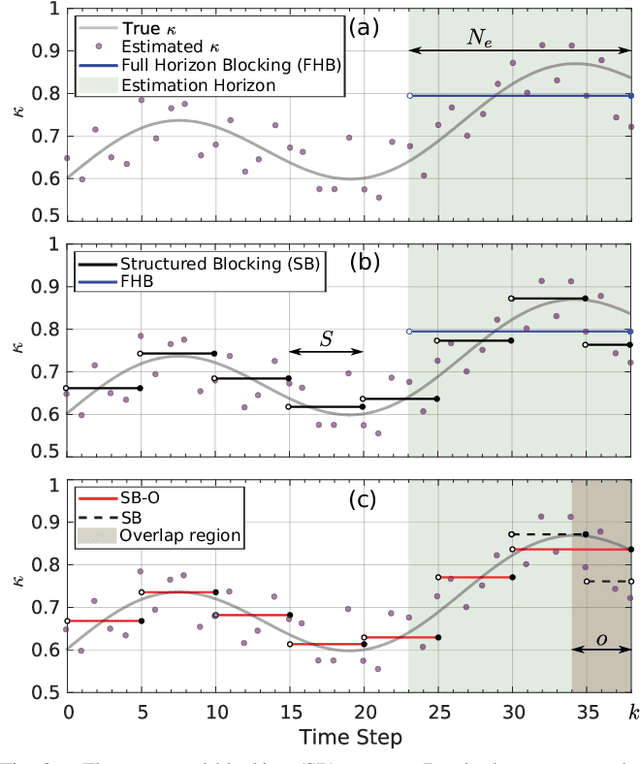
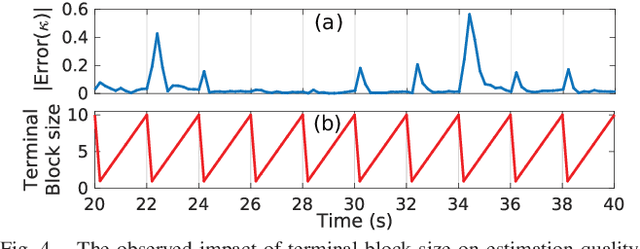
The control of field robots in varying and uncertain terrain conditions presents a challenge for autonomous navigation. Online estimation of the wheel-terrain slip characteristics is essential for generating the accurate control predictions necessary for tracking trajectories in off-road environments. Receding horizon estimation (RHE) provides a powerful framework for constrained estimation, and when combined with receding horizon control (RHC), yields an adaptive optimisation-based control method. Presently, such methods assume slip to be constant over the estimation horizon, while our proposed structured blocking approach relaxes this assumption, resulting in improved state and parameter estimation. We demonstrate and compare the performance of this method in simulation, and propose an overlapping-block strategy to ameliorate some of the limitations encountered in applying noise-blocking in a receding horizon estimation and control (RHEC) context.