 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReceding horizon estimation and control with structured noise blocking for mobile robot slip compensation
Oct 10, 2018

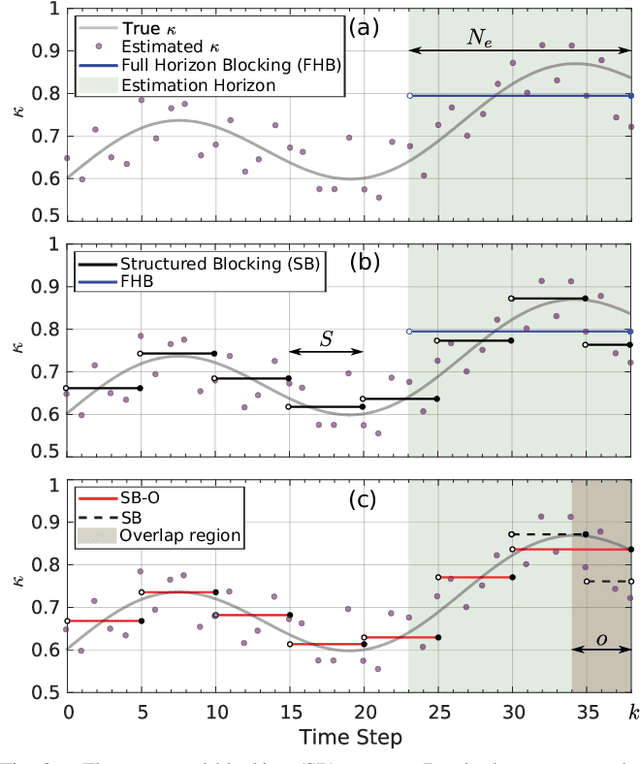
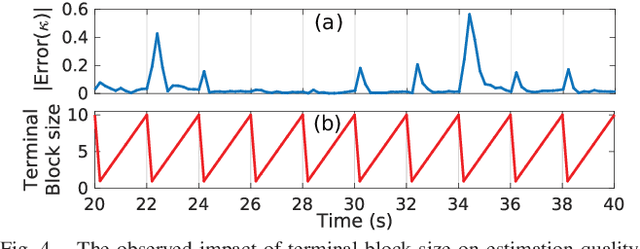
The control of field robots in varying and uncertain terrain conditions presents a challenge for autonomous navigation. Online estimation of the wheel-terrain slip characteristics is essential for generating the accurate control predictions necessary for tracking trajectories in off-road environments. Receding horizon estimation (RHE) provides a powerful framework for constrained estimation, and when combined with receding horizon control (RHC), yields an adaptive optimisation-based control method. Presently, such methods assume slip to be constant over the estimation horizon, while our proposed structured blocking approach relaxes this assumption, resulting in improved state and parameter estimation. We demonstrate and compare the performance of this method in simulation, and propose an overlapping-block strategy to ameliorate some of the limitations encountered in applying noise-blocking in a receding horizon estimation and control (RHEC) context.
Multi-Vehicle Trajectory Optimisation On Road Networks
Oct 05, 2018



This paper addresses the problem of planning time-optimal trajectories for multiple cooperative agents along specified paths through a static road network. Vehicle interactions at intersections create non-trivial decisions, with complex flow-on effects for subsequent interactions. A globally optimal, minimum time trajectory is found for all vehicles using Mixed Integer Linear Programming (MILP). Computational performance is improved by minimising binary variables using iteratively applied targeted collision constraints, and efficient goal constraints. Simulation results in an open-pit mining scenario compare the proposed method against a fast heuristic method and a reactive approach based on site practices. The heuristic is found to scale better with problem size while the MILP is able to avoid local minima.